Flyingsaw, Appendix – Lenze EVS93xx FlyingSaw User Manual
Page 139
FlyingSaw
Appendix
Prepared Solution Servo PLC / ECSxA 1.1 EN
11-17
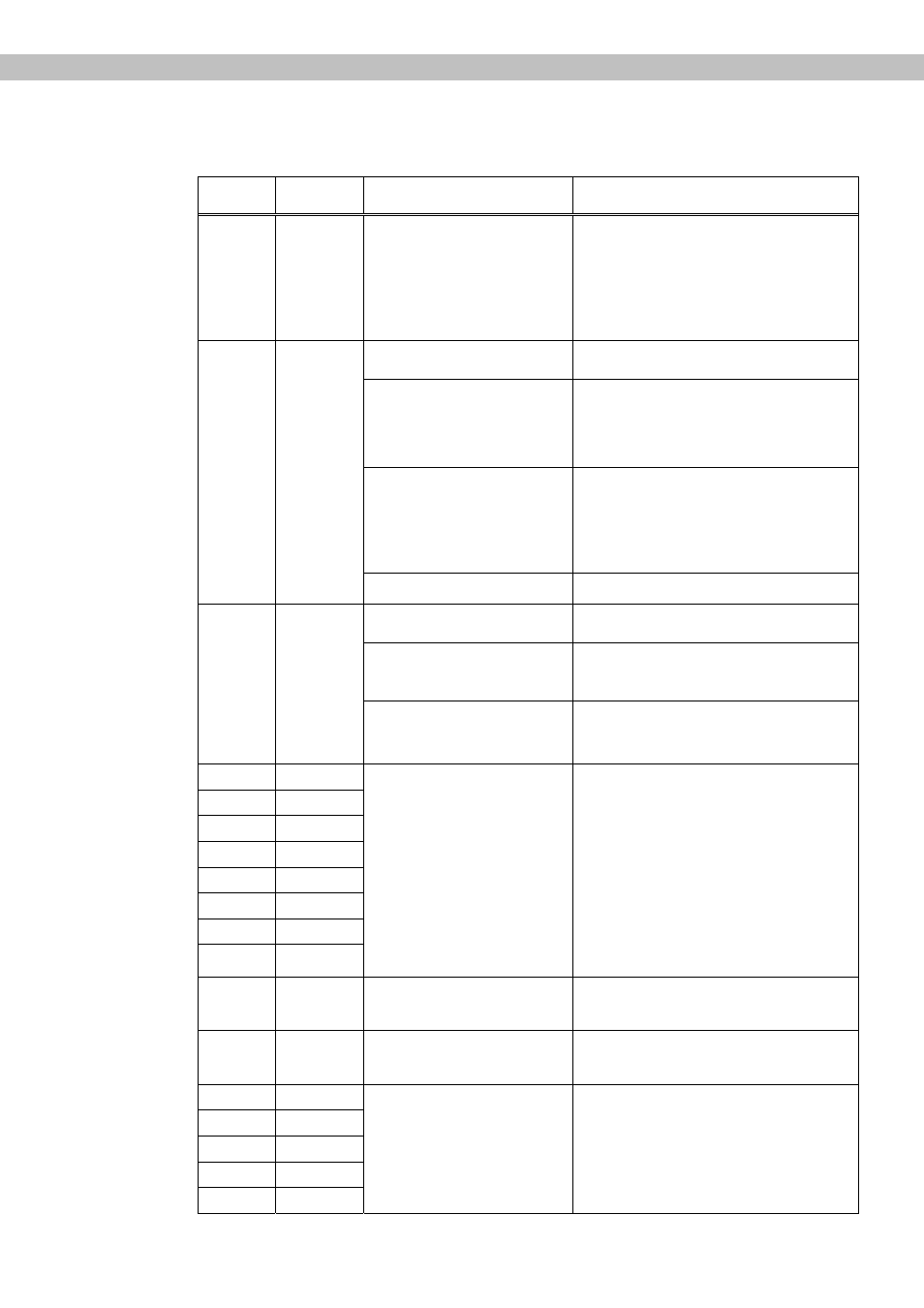
Error
number
Error code
Cause
Remedy
126
CE15
CAN aux.
Communication error in the gateway
function (C0370, C0371) via CAN-AUX
Check baud rate of all nodes
Check wiring:
-
Check bus terminating resistors
-
Check shield connection on the cables
- Check
PE
connection
-
Check bus load (e.g. using software tool
PCANView)
Reduce baud rate (CAUTION: pay attention to CAN bus
cable lengths)
Drive mechanically overloaded (e.g.
active load on hoists excessive)
Check drive dimensioning
Check mechanism for stiffness or jamming
Increase ramp times to reduce the dynamics
Torque limit reached
Increase torque limit:
-
Directly using system variables
MCTRL_nHiMLim_a
, MCTRL_nLoMLim_a
- Indirectly
using
current limit in code C0022/000
-
Check the motor data (codes C0081/000 to
C0092/000)
Fault in the speed feedback system
Check the speed feedback:
−
Check the parameter setting for the speed
feedback system (C0025/000, C0495/000)
−
Check rotor position and re-adjust if necessary
(C0058/000, C0095/000)
−
Check the wiring/polarisation of the speed
feedback system
190
NErr
Tolerance window C0576/000 set too
low
Increase the tolerance window in code C0576/000.
Active load (e.g. on hoists) excessive
Check current limit in code C0022/000 and increase if
possible (CAUTION: pay attention to motor current limit!)
Check drive dimensioning
Torque limit reached
Increase torque limit:
-
Directly using system variables
MCTRL_nHiMLim_a
, MCTRL_nLoMLim_a
- Indirectly
using
current limit in code C0022/000
200
NMAX
In case of speed feedback: the actual
speed/rotor position is being measured
incorrectly
Check selection of the feedback system (code
C0025/000)
Check the motor data (codes C0081/000 to C0092/000)
Check rotor position and re-adjust if necessary
(C0058/000, C0095/000)
201
Overrun Task1
Id2
202
Overrun Task2
Id3
203
Overrun Task3
Id4
204
Overrun Task4
Id5
205
Overrun Task5
Id6
206
Overrun Task6
Id7
207
Overrun Task7
Id8
208
Overrun Task8
Id9
The runtime for the related task is taking
longer than defined in the watchdog time
(as programmed in the task configuration
in DDS)
Reduce the load on the task by moving sub-routines that
are not time critical to lower priority tasks, tasks with a
greater interval time or to the cyclic task
Increase the interval time for the task.
Check the arithmetic operation for division by 0.
Check your program code for infinite loops
(REPEAT/UNTIL, WHILE, FOR loops) and recursive
calls and remove these structures.
On the use of free CAN objects: reduce the number of
telegrams received per unit time with identifiers that do
not correspond to the system blocks CAN1, CAN2 or
CAN3.
In case of activated data consistency: deactivate the
default setting for data consistency in DDS (Zielsystem
(Target system) menu command) and use the library
Lenze32BitTransferDrv.lib
.
209
Floatfehler Sys-
Task Id0
An error has occurred during a floating
point operation in the system task.
Consultation with Lenze necessary (service hotline:
(+49) 5154 82-1111)
210
Floatfehler
PLC_PRG Id1
An error has occurred during a floating
point operation in the cyclic task
(PLC_PRG or a POE called).
Check all floating point operations in the cyclic task and
sub-routines called by them.
Remove/prevent divisions by 0.
211
Floatfehler
Task1 Id2
212
Floatfehler
Task2 Id3
213
Floatfehler
Task3 Id4
214
Floatfehler
Task4 Id5
215
Floatfehler
Task5 Id6
An error has occurred during a floating
point operation in the cyclic task
(PLC_PRG or a POE called).
Check all floating point operations in the cyclic task and
sub-routines called by them.
Remove/prevent divisions by 0.