2 global variables, 1 global, Global variables -2 – Lenze EVS93xx FlyingSaw User Manual
Page 124: Global -2, Flyingsaw, Appendix
FlyingSaw
Appendix
Prepared Solution Servo PLC / ECSxA 1.1 EN
11-2
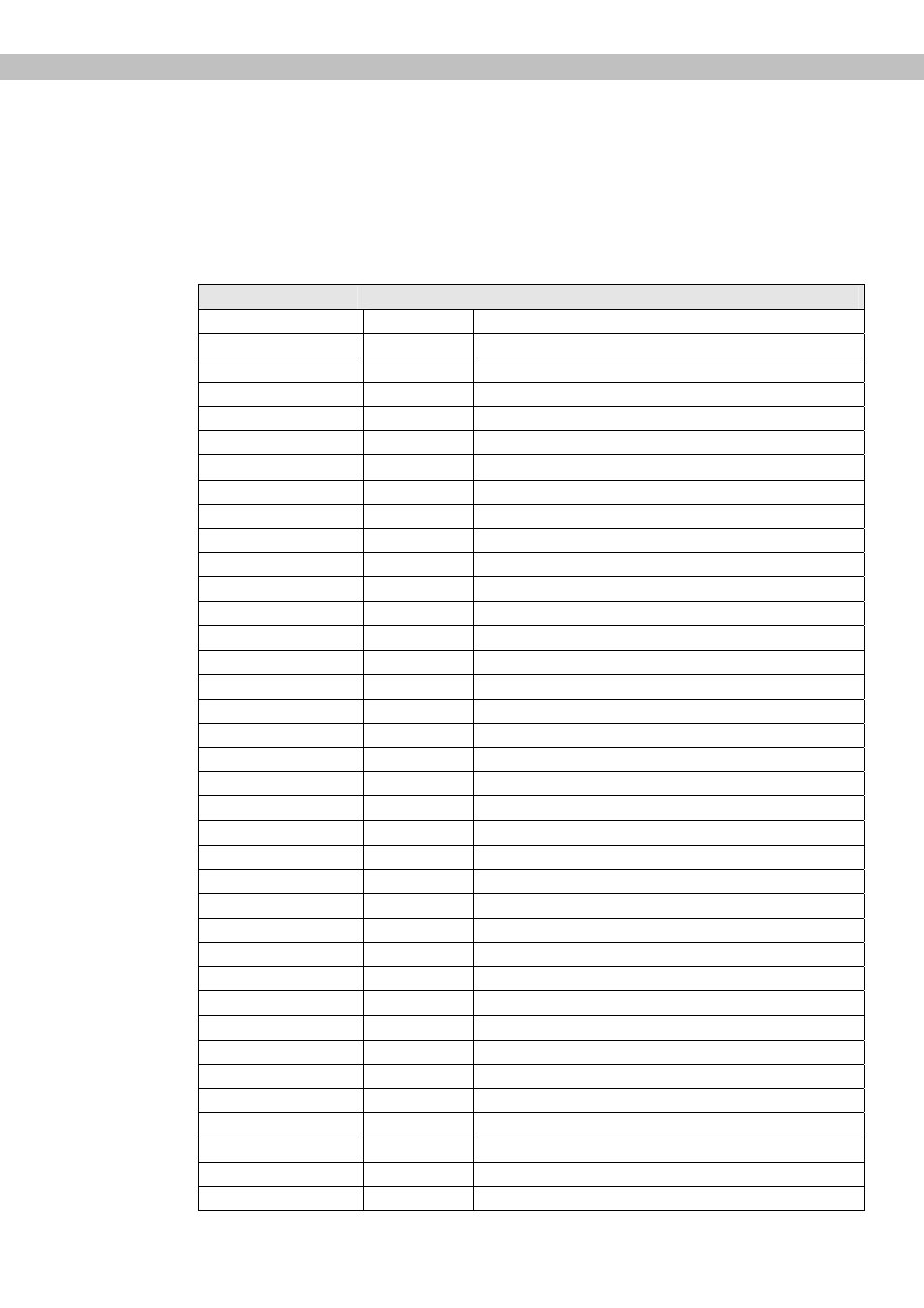
11.2 Global
variables
11.2.1 Global
Global variables
(Variable type: VAR_GLOBAL)
Identifier Data
type
Value/meaning
g_dnScaleWheel
DINT
Circumference of the measuring wheel
g_dnPulseSensor DINT Encoder
pulses from the measuring wheel
g_nFrequencyDFIN
INT
Input frequency of the measuring wheel
g_nFrequencyDFINNorm INT
Standardised input frequency of the measuring wheel
g_bStartlengthCalculator
BOOL
Start the length calculator
g_dnCutLengthInput DINT Set
length
g_dnGapLengthInput
DINT
Length of the gap
g_dnGapLength_p
DINT
Length of the gap in increments
g_bMarkenSyncAxtive
BOOL
Activate mark synchronisation
g_bOffsetUsed
BOOL
Offset taken into account during a length cut
g_bCalculateNewOffset
BOOL
Calculate new offset
g_dnTir
DINT
Flying saw acceleration time
g_bOffsetConsider BOOL Offset
value has been taken into consideration
g_dnOffsetLengthCalculator
DINT
Offset for the length calculator
g_dnOffsetSynchronize
DINT
Offset for the synchronisation
g_bStartDecelerationSaw
BOOL
Start of the deceleration ramp
g_nCompensationTrimming INT
Increments
that
are compensated during the synchronisation
g_nCompensationTrimmingUsed INT
Compensation
completed
g_dnCutterKompensation
DINT
Width of cut compensation
DelaySynchronSignal
INT
Delay on the synchronised signal
g_bReset BOOL
Reset
g_bResetSync
BOOL
Reset the synchronisation
g_bExternSetValuesEnable BOOL
Switch to external setpoints
g_dnAbortCalcOffset_units
DINT
Calculation of the offset is interrupted just before synchronising
g_dnAbortCalcOffset_Inc
DINT
Calculation of the offset is interrupted just before synchronising
g_dnActualValueLengthCalculator DINT
Actual length calculator value
g_nSpeedOutSaw
INT
Flying saw set speed
g_dnPosDiffOutSaw
DINT
Setpoint for the phase controller
g_bAutomaticFlag
BOOL
Automatic mode is active
g_bWatchLengthTP
BOOL
Mark monitoring active
g_ManualProfile
Profile
Profile for jogging
g_SecondProfile
Profile
Profile for the movement to the initial position
g_BackProfile
Profile
Profile for return positioning after a synchronous movement
g_FreeDriveLimitSwitch Profile
Move clear from limit switch
g_Profile Profile
Profile
data
g_Axis Axis
Axis
data