2 function block software_limit, Function block software_limit -4, Flyingsaw – Lenze EVS93xx FlyingSaw User Manual
Page 102: Description of the function blocks
FlyingSaw
Description of the function blocks
Prepared Solution Servo PLC / ECSxA 1.1 EN
10-4
10.2
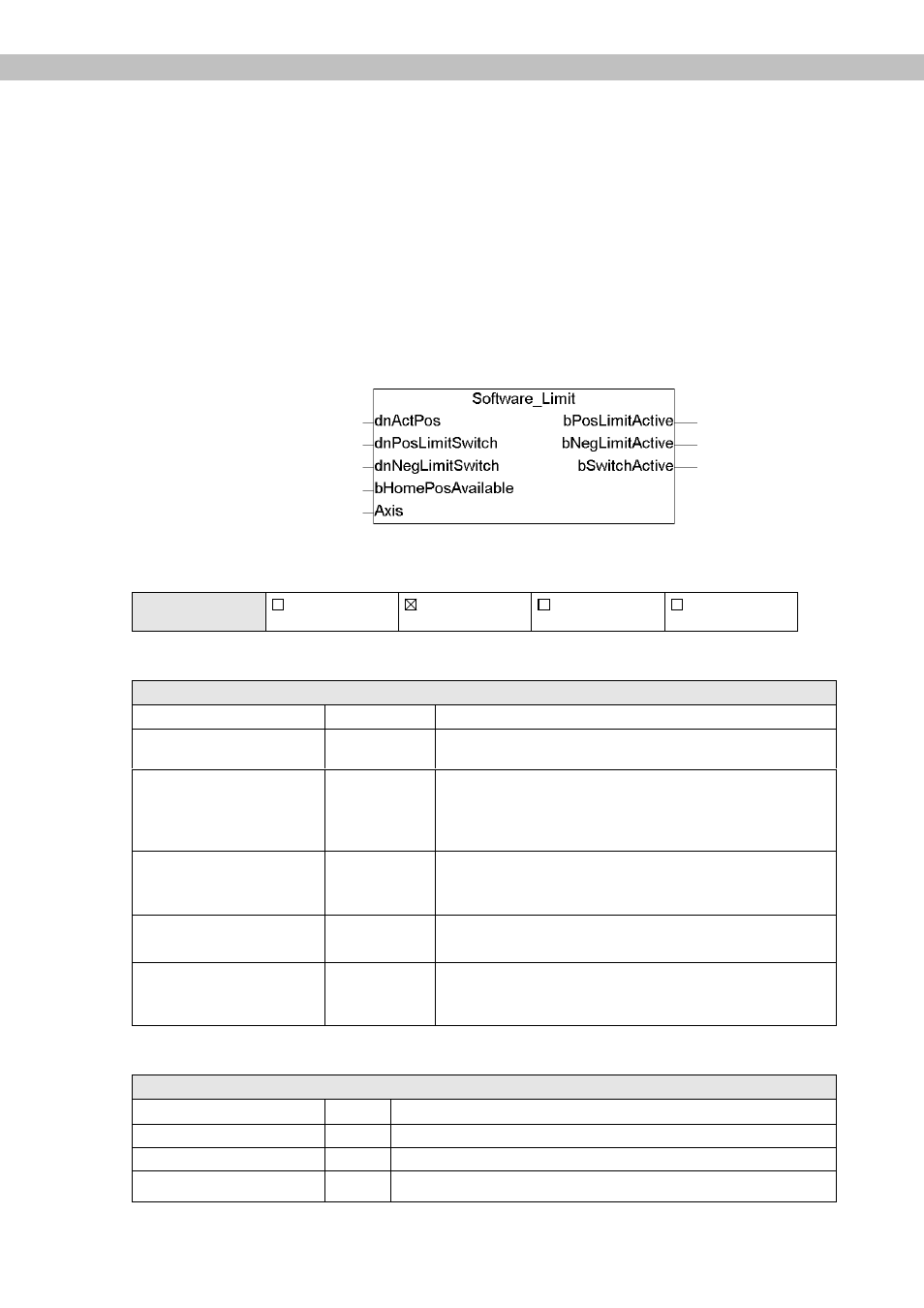
Function block Software_Limit
This function block monitors the software limit positions set. The block is only active after
homing has been performed. This means that during homing only the hardware limit positions
(physical limit switches) are actively monitored.
The position entry for the positive and negative software limit switches must not be equal to
zero and be within the possible limits so that the software limit positions are monitored.
Task information
Can be called in:
Cyclic task
Time-controlled task
(INTERVAL)
Event-controlled task
(EVENT)
Interrupt task
Inputs
(Variable type: VAR_INPUT)
Identifier Data
type
Value/meaning
dnActPos DINT
Actual phase position of the axis "flying saw"
¾
65536 inc correspond to one revolution on the motor end
dnPosLimitSwitch DINT
Input
for the position of the positive software limit switch
¾
The entry is made in the application unit [units] and must have the value > 0.
The reference here is the home position.
¾
The software limit position is only active for an entry > 0.
dnNegLimitSwitch DINT
Input for the position of the negative software limit switch
¾
The entry is made in the application unit [units] and must have a value <0. The
reference here is the home position.
¾
The software limit position is only active for an entry <0.
bHomePosAvailable BOOL
Input for the signal "Homing done"
¾
The software limit position monitoring is only activated once the home position
is known
Axis MC_AXIS_REF
Machine parameters
¾
Data structure with elements that contain the machine parameters in the
internal measuring system.
¾
Connect this input to a global variable written by the FB L_MCMachineData.
Outputs
(Variable type: VAR_OUTPUT)
Identifier Data
type
Value/meaning
bPosLimitActive
BOOL
Status signal "Positive software limit position reached"
bNegLimitActive
BOOL
Status signal "Negative software limit position reached"
bSwitchActive BOOL
Status signal "Software limit position monitoring active"