Flyingsaw, Appendix – Lenze EVS93xx FlyingSaw User Manual
Page 130
FlyingSaw
Appendix
Prepared Solution Servo PLC / ECSxA 1.1 EN
11-8
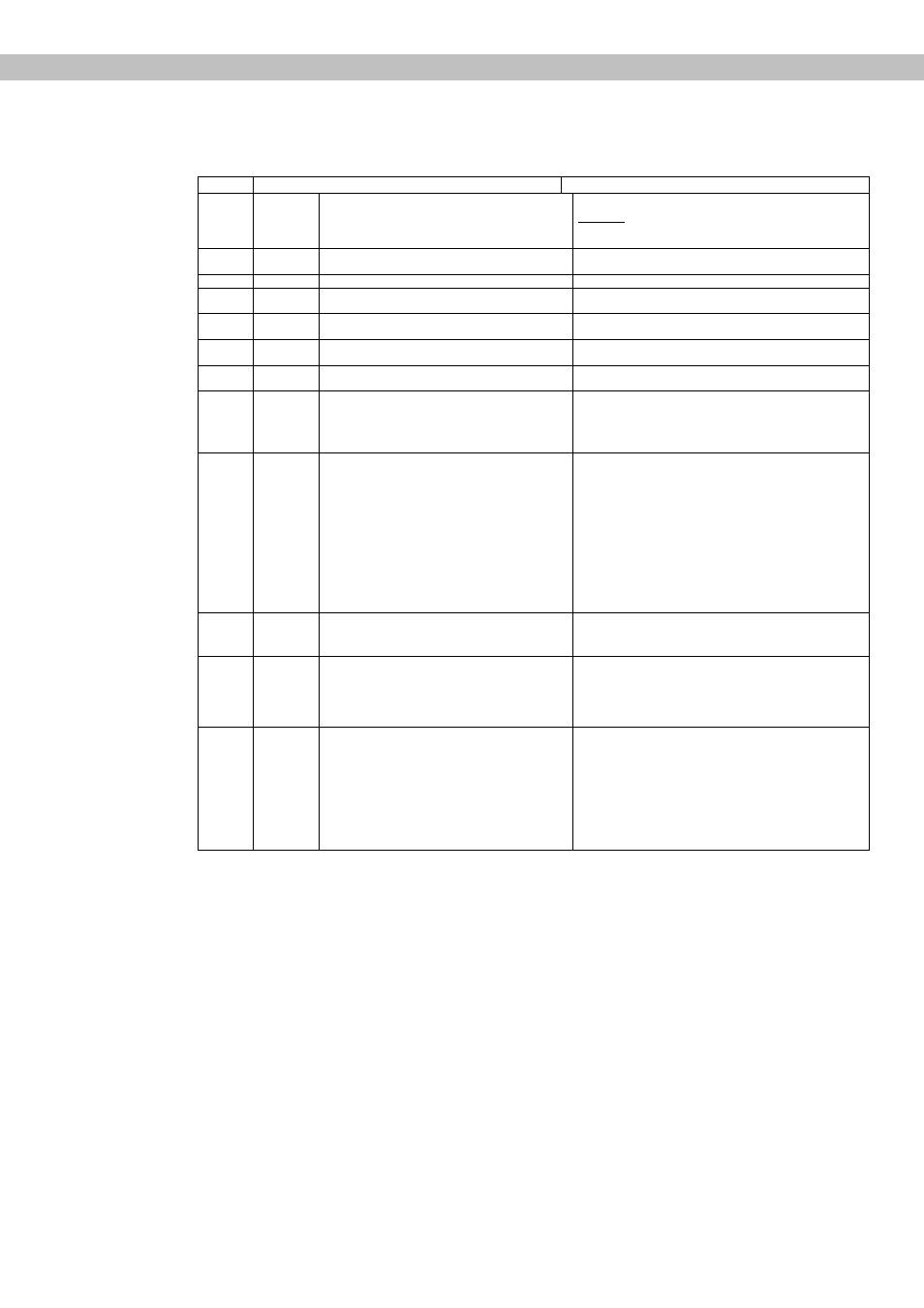
Possible settings:
C3224
0.0000
-214748.0000... {0.0001
[units]}
0 Limit position for the negative software limit
Comment: software limits are only active if the home
position for the axis is known and the limits are not set to
zero.
C3225 100.0000 -214748.0000...
{0.0001
[inc]}
... 214748.0000 Home offset
C3242
100
1
{1[rpm]}
... 16000 Speed for the homing
C3252
5.00
0.01
{0.01[s]}
... 650.00 Ramp times for the homing:
These ramp times relate to C0011/000.
C3300 500.0000
-214000.0000...
{0.0001
[units/s]}
... 214000.0000 Speed for the return movement profile for the axis
positioning at the initial position.
C3301 7500.0000
-214000.0000...
{0.0001
[units/s^2]}
... 214000.0000 Acceleration for the return movement profile for the axis
positioning at the initial position.
C3302 7500.0000
-214000.0000...
{0.0001
[units/s^2]}
... 214000.0000 Deceleration for the return movement profile for the axis
positioning at the initial position.
0:
metric (1[s_unit] = 1[mm])
C3501 0
1:
imperial (1[s_unit] = 1[inch])
Selection of the measuring system:
This code has no effect on the functionality, but affects only
the visualisations in the programmable variant of the
Prepared Solution.
C3990 -
1:
10:
20:
21:
22:
30:
40:
41:
42:
43
50:
100:
Error state
Standby state Manual operation
Positive manual control
Negative manual control
Homing active
Automatic "flying saw"
Top cut is being performed
Length cut active
Mark cut active
Move to initial position
Initialisation
Display code: state of the "flying saw" Prepared Solution
C3998
-
0...
{1}
... 65535 Display code: actual error message, this contains system
and application error messages.
C3999
-
0 ...
{0.01}
... 99.99 Display code: version of the Prepared Solution. T
the first and the
second number is the main versio, the third and the fourth is the
subversion and the fith and the sixth is the number of the service-
pack.
C4000 0 0:
1:
2:
3:
4:
5:
6:
Internal control words
CAN1
CAN2
CAN3
AIF1
AIF2
AIF3
Preselection of the control interface:
All three axes in the system can be controlled using the
control interface.