Control characteristic, Function library, Function blocks – Lenze EVS9332xS User Manual
Page 195
Function library
Function blocks
3.2.48
Process controller (PCTRL1)
3−143
l
EDSVS9332S−EXT EN 2.0
3.2.48.1
Control characteristic
l
In the default setting, the PID algorithm is active.
l
The D−component can be deactivated by setting code C0224 to zero. Thus, the controller
becomes a PI−controller (or P−controller if the I−component is also switched off).
l
The I−component can be switched on or off online via the PCTRL−I−OFF input. For this, the
input is assigned a digital signal source (e.g. one of the freely assignable digital input
terminals). If the I−component is to be switched off permanently, the input is assigned the
signal source "FIXED1".
– PCTRL−I−OFF = HIGH switches off the I−component
– PCTRL−I−OFF = LOW switches on the I−component
l
The reset time is parameterised via C0223.
l
The P−gain can be set in different ways. The function providing the P−gain is selected under
C0329:
– C0329 = 0
The P−gain is entered under C0222.
– C0329 = 1
The P−gain is entered via the PCTRL−ADAPT input. The input value is led via a linear
characteristic. The slope of the characteristic is set under C0222 (upper limit) and C0325
(lower limit). The value under C0222 is valid if the input value = +100 % or −100 %. The value
under C0325 applies if the input value is 0 %.
0
100 %
PCTRL−ADAPT
V
p
V
p1
V
p2
Input data:
V
p1
= C0222
V
p2
= C0325
Display value:
V
pact
= C0336
Fig. 3−128
Input of the P−gain via PCTRL−ADAPT input
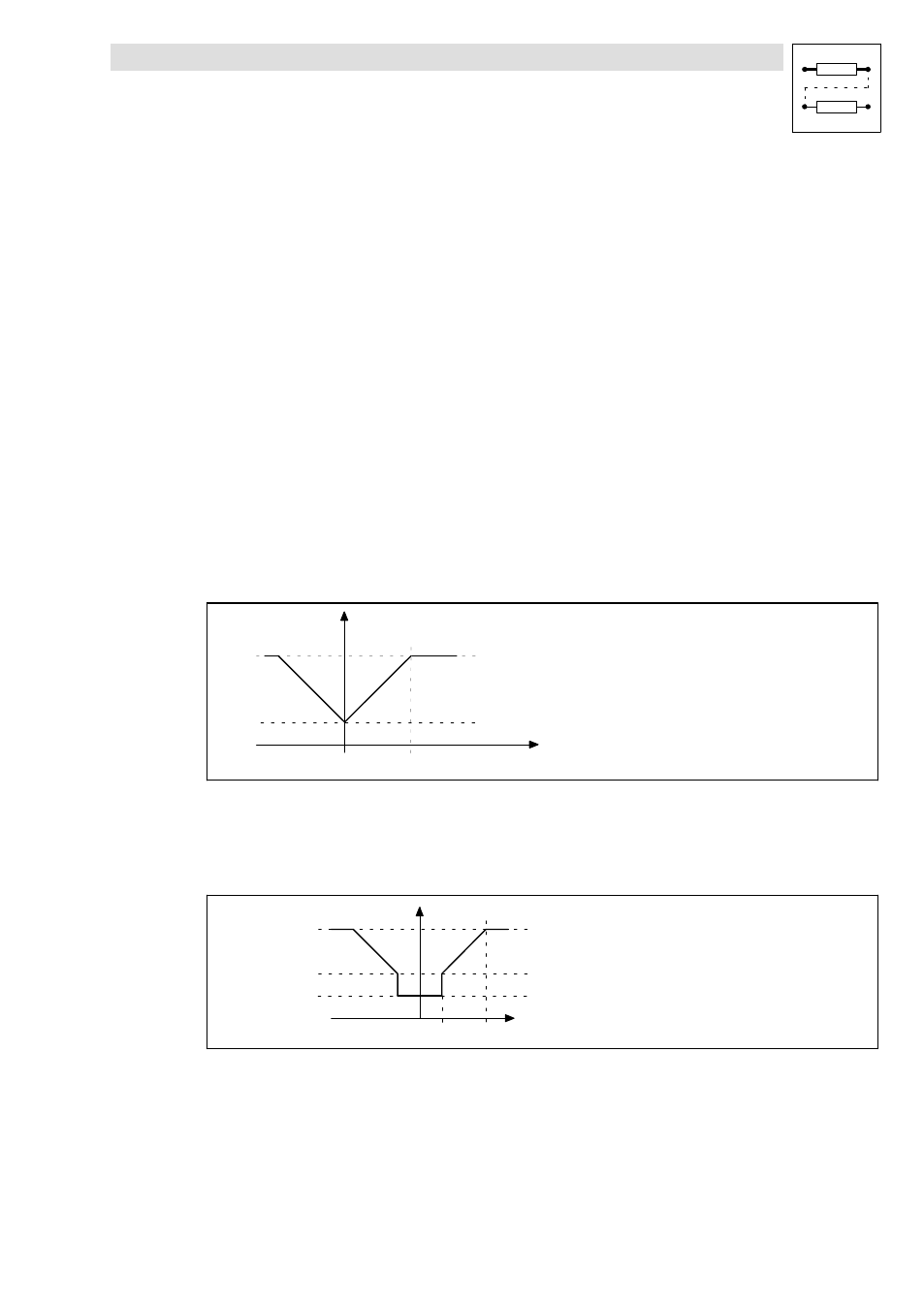
– C0329 = 2
The P−gain is derived from the process setpoint PCTRL−SET. The setpoint is measured after
the ramp function generator and calculated by means of a characteristic with three
interpolation points.
V
p
V
p1
V
p2
V
p3
s
s
0
s
1
Input data:
V
p1
= C0222
V
p2
= C0325
V
p3
= C0326
s
0
= C0328
s
1
= C0327
Display value:
V
pact
= C0336
Fig. 3−129
P−gain derived from the PCTRL−SET process setpoint
– C0329 = 3
The P−gain is derived from the control difference and calculated by means of a characteristic
as for C0329 = 2.