S ramp, Arithmetic operation, Additional setpoint – Lenze EVS9332xS User Manual
Page 186: Function library, Function blocks
Function library
Function blocks
3.2.45
Speed setpoint conditioning (NSET)
3−134
l
EDSVS9332S−EXT EN 2.0
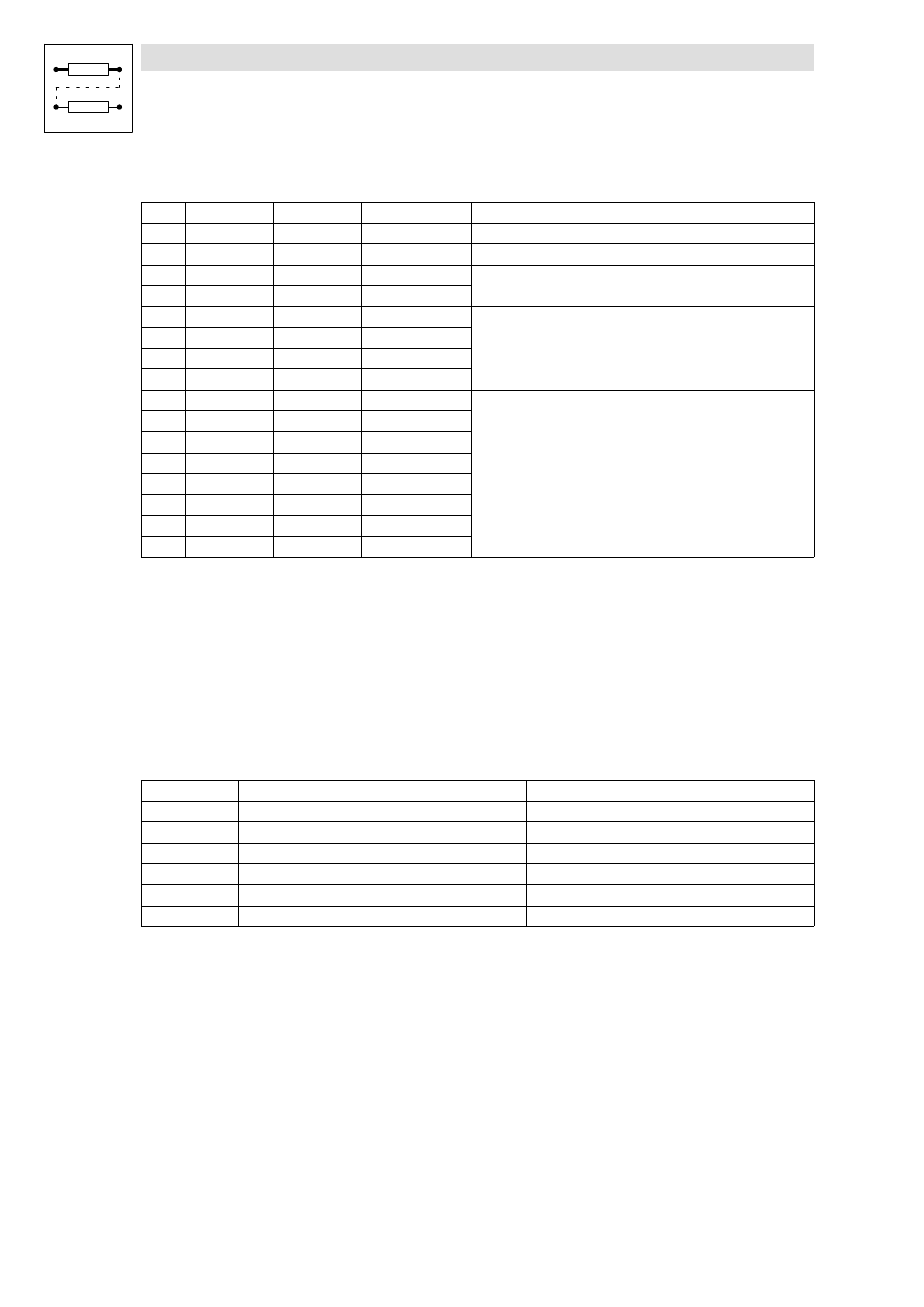
Priorities:
CINH
NSET−LOAD
NSET−RFG−0
NSET−RFG−STOP
Function
0
0
0
0
RFG follows the input value via the set ramps
0
0
0
1
The value at the output of RFG is frozen
0
0
1
0
RFG decelerates to zero along the set deceleration time
0
0
1
1
0
1
0
0
RFG accepts the value applied to input NSET−SET and provides it at its
output
0
1
0
1
0
1
1
0
0
1
1
1
1
0
0
0
RFG accepts the value applied to input CINH−VAL and provides it at its
output
1
0
0
1
1
0
1
0
1
0
1
1
1
1
0
0
1
1
0
1
1
1
1
0
1
1
1
1
3.2.45.4
S ramp
The linear ramp function generator is connected to a PT1 element. This arrangement implements an
S ramp for an almost jerk−free acceleration and deceleration.
l
The PT1 element is switched on and off via C0134.
l
The time constant is set via C0182.
3.2.45.5
Arithmetic operation
The output value is led to an arithmetic module. This module links the main setpoint and the additional
setpoint arithmetically. The arithmetic operation is selected via C0190 (see the following table).
C0190
Function
Example
0
Output = X (Y is not processed)
−
1
Output = X + Y
100 % = 50 % + 50 %
2
Output = X − Y
50 % = 100 % − 50%
3
Output = X * Y
100 % = 100 % * 100%
4
Output = X/|Y|
1 % = 100 % / 100%
5
Output = X/(100% − Y)
200 % = 100 % / (100 % − 50 %)
3.2.45.6
Additional setpoint
l
An additional setpoint (e.g. a correction signal) can be linked with the main setpoint via the
input NSET−NADD.
l
The input signal can be inverted via the input NSET−NADD−INV before affecting the ramp
function generator. The ramp function generator has a linear characteristic and an acceleration
time and deceleration time each.
l
With NSET−LOAD = HIGH the ramp function generator is set to zero and kept there without
considering the T
i
times.The same applies when the controller is inhibited.