Profile generator, Configuration, Basic configurations – Lenze EVS9332xS User Manual
Page 45
Configuration
Basic configurations
2.2.6
Angular synchronism
2−33
l
EDSVS9332S−EXT EN 2.0
2.2.6.7
Profile generator
The speed travel profile for homing is generated via a profile generator. During the homing process
the target can be changed.
The profile generator generates a speed travel profile with linear ramps.
The following parameters must be entered:
Code
Meaning
Input
C0930
Gearbox ratio − numerator
1 ... 65535
Numerator of the gearbox ratio between motor and position encoder (motor side)
C0931
Gearbox ratio − denominator
1 ... 65535
Denominator of the gearbox ratio between motor and position encoder (encoder
side)
C0934
Home position offset
−2,140,000,000 ... +2,140,000,000 inc
Distance between zero pulse or touch probe and the home position during the
homing process
C0935
Homing speed
0.0001 ... 100.0000 % n
max
Motor speed during the homing process
C0936
Homing T
i
time
0.01 ... 990.00 s
Acceleration and deceleration time during the homing process.
Reference: 0 ... n
max
or n
max
... 0
The travel profile for homing is determined by entering a percentage speed and an integration time
(T
i
) for the ramps. The home position offset is directly entered in increments of the encoder system.
(In this way, complex conversions and the entry of e. g. the feed constant can be avoided)
The home position can be approached in three ways:
l
Case 1: High home position offset
l
Case 2: Home position offset = 0; the zero pulse has not yet occurred during the homing
process
l
Case 3: Home position offset = 0; the zero pulse has occurred once during the homing
process
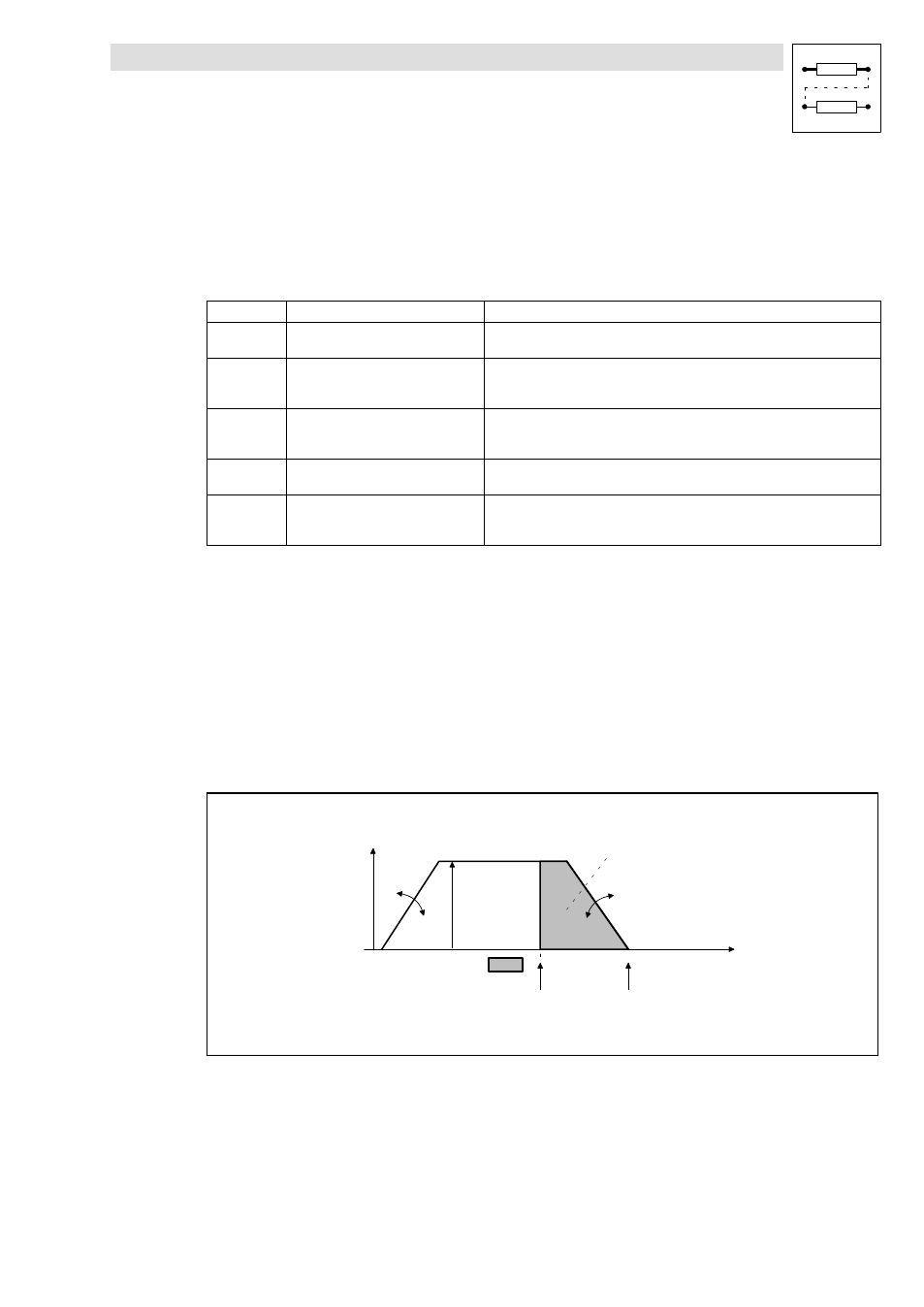
High home position offset (case 1)
V
t
Reference
switch
Home position offset
Zero pulse
Home position
C0935
C0936
C0936
Fig. 2−10
Approaching the home position (case 1)