Derivative time 65, Output power offset (manual reset) 65, Pid adjustments 65 – Red Lion TSC User Manual
Page 67
INTEGRAL TIME (Cont’d)
If integral action is disabled (Automatic Reset), manual reset is available by
modifying the output power offset (“OPOF” initially set to zero) to eliminate
steady state errors. This parameter appears in unprotected parameter mode
when integral time is set to zero. The controller has the feature to prevent
integral action when operating outside the proportional band. This prevents
“reset wind-up”.
Note: The Proportional band shift due to integral action may itself be “reset”
by temporarily setting the controller into the ON/OFF control mode
(proportional band =0).
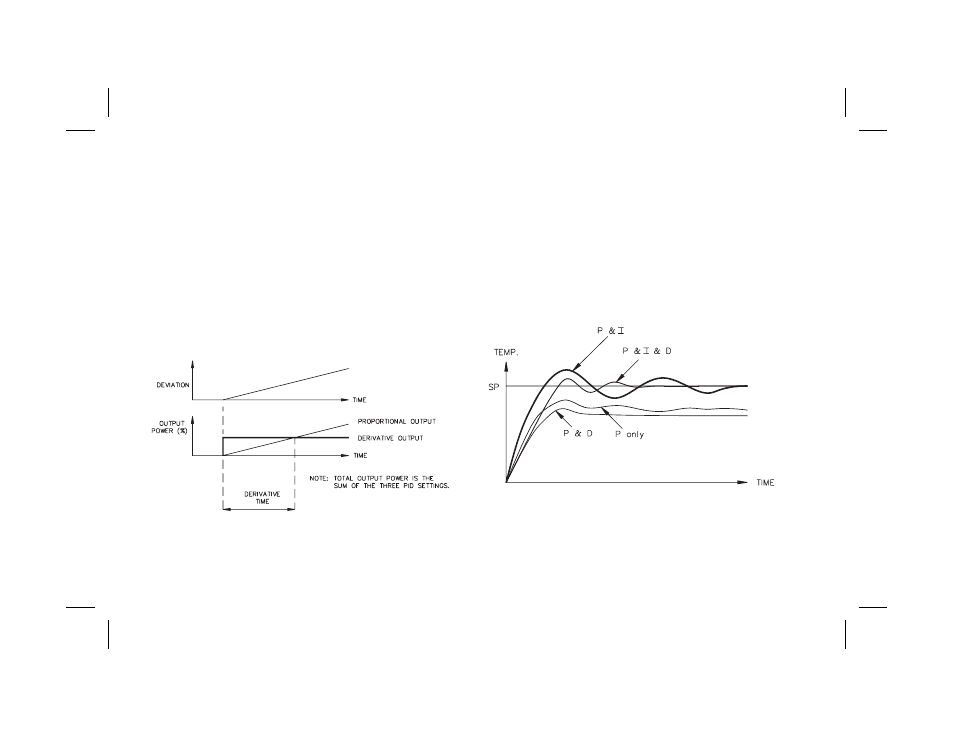
DERIVATIVE TIME
Derivative time is defined as the time, in seconds, in which the output due to
proportional action alone equals the output due to derivative action with a
ramping process error. As long as ramping error exists, the derivative action
will be “repeated” by proportional action every derivative time. The units of
derivative time are seconds per repeat.
Derivative action is used to shorten the process response time and helps to
stabilize the process by providing an output based on the rate of change of the
process. In effect, derivative action anticipates where the process is headed
and changes the output before it actually “arrives”. Increasing the derivative
time helps to stabilize the response, but too much derivative time coupled
with noisy signal processes, may cause the output to fluctuate too greatly
yielding poor control. None or too little derivative action usually results in
decreased stability with higher overshoots. No derivative action usually
requires a wider proportional and slower integral times to maintain the same
degree of stability as with derivative action. Derivative action is defeated by
setting the time to zero.
OUTPUT POWER OFFSET (MANUAL RESET)
If the integral time is set to 0 (automatic reset is off), it may be necessary to
modify the output power to eliminate errors in the steady state. The output
power offset (OPOF) parameter will appear in the unprotected mode, if the
integral time = 0. If integral action (automatic reset) is later invoked, the
previous output power offset remains in effect.
PID ADJUSTMENTS
To aid in the adjustment of the PID parameters for improved process
control, a temperature chart recorder is necessary to provide a visual means of
analyzing the process. Compare the actual process response to the PID
response figures with a step change to the process. Make changes to the PID
parameters in no more than 20% increments from the starting value and allow
the process sufficient time to stabilize before evaluating the effects of the new
parameter settings.
-65-