Pid control 64, Proportional band 64, Integral time 64 – Red Lion TSC User Manual
Page 66: Pid control
PID CONTROL
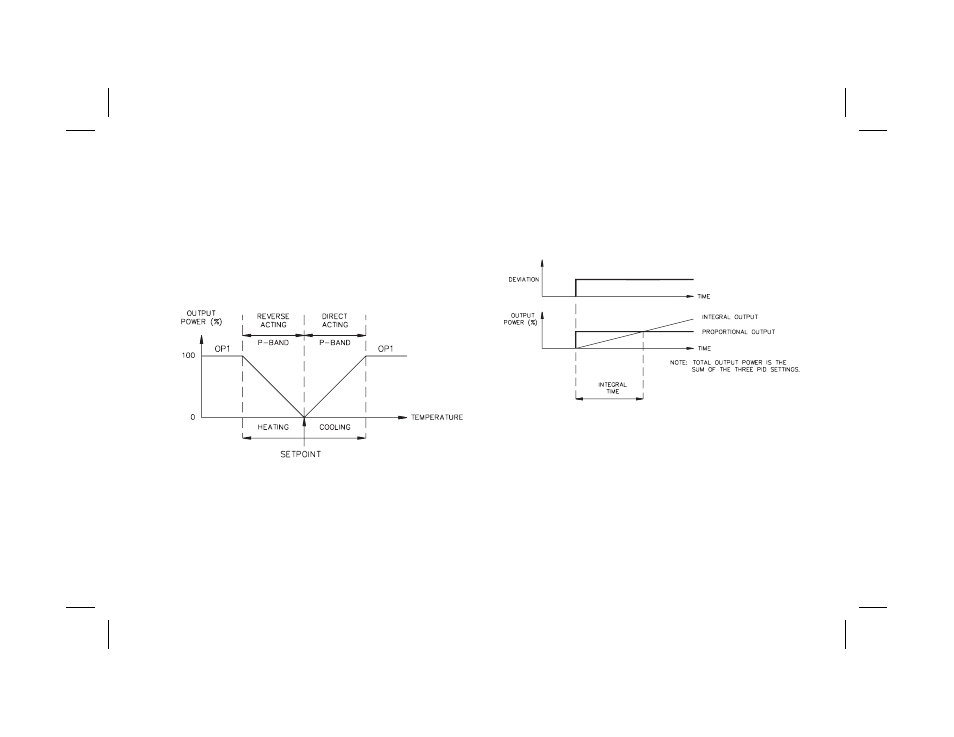
PROPORTIONAL BAND
Proportional band is defined as the “band” of temperature the process
changes to cause the percent output power to change from 0% to 100%. The
band may or may not be centered about the setpoint value depending upon the
steady state requirements of the process. The band is shifted by manual offset
or integral action (automatic reset) to maintain zero error. Proportional band is
expressed as percent of input sensor range.
(Ex. Thermocouple type T with a temperature range of 600°C is used and is
indicated in degrees C with a proportional band of 5%. This yields a band of
600°C x 5% = 30°C)
The proportional band should be set to obtain the best response to a
disturbance while minimizing overshoot. Low proportional band settings
(high gain) result in quick controller response at expense of stability and
increased overshoot. Settings that are excessively low will produce
continuous oscillations at setpoint. High proportional band settings (low gain)
results in a sluggish response with long periods of process “droop”. A
proportional band of 0.0% forces the controller into ON/OFF control mode
with its characteristic cycling at setpoint (see ON/OFF Control).
INTEGRAL TIME
Integral time is defined as the time, in seconds, in which the output due to
integral action alone equals the output due to proportional action with a
constant process error. As long as a constant error exists, integral action will
“repeat” the proportional action every integral time. Integral action shifts the
center point position of the proportional band to eliminate error in the steady
state. The units of integral time are seconds per repeat.
Integral action (also known as “automatic reset”) changes the output power
to bring the process to setpoint. Integral times that are too fast (small times) do
not allow the process to respond to the new output value and, in effect, “over
compensate” which leads to an unstable process with excessive overshoot.
Integral times that are too slow (large times) produce a response which is
sluggish to eliminate steady state errors. Integral action may be disabled by
setting the term to 0. If done so, the previous integral output power value is
maintained to keep the output at a constant level.
-64-