Parameter settings, 1 parameter table – IAI America ACON-SE User Manual
Page 85
75
5. Parameter Settings
5. Parameter
Settings
5.1 Parameter
Table
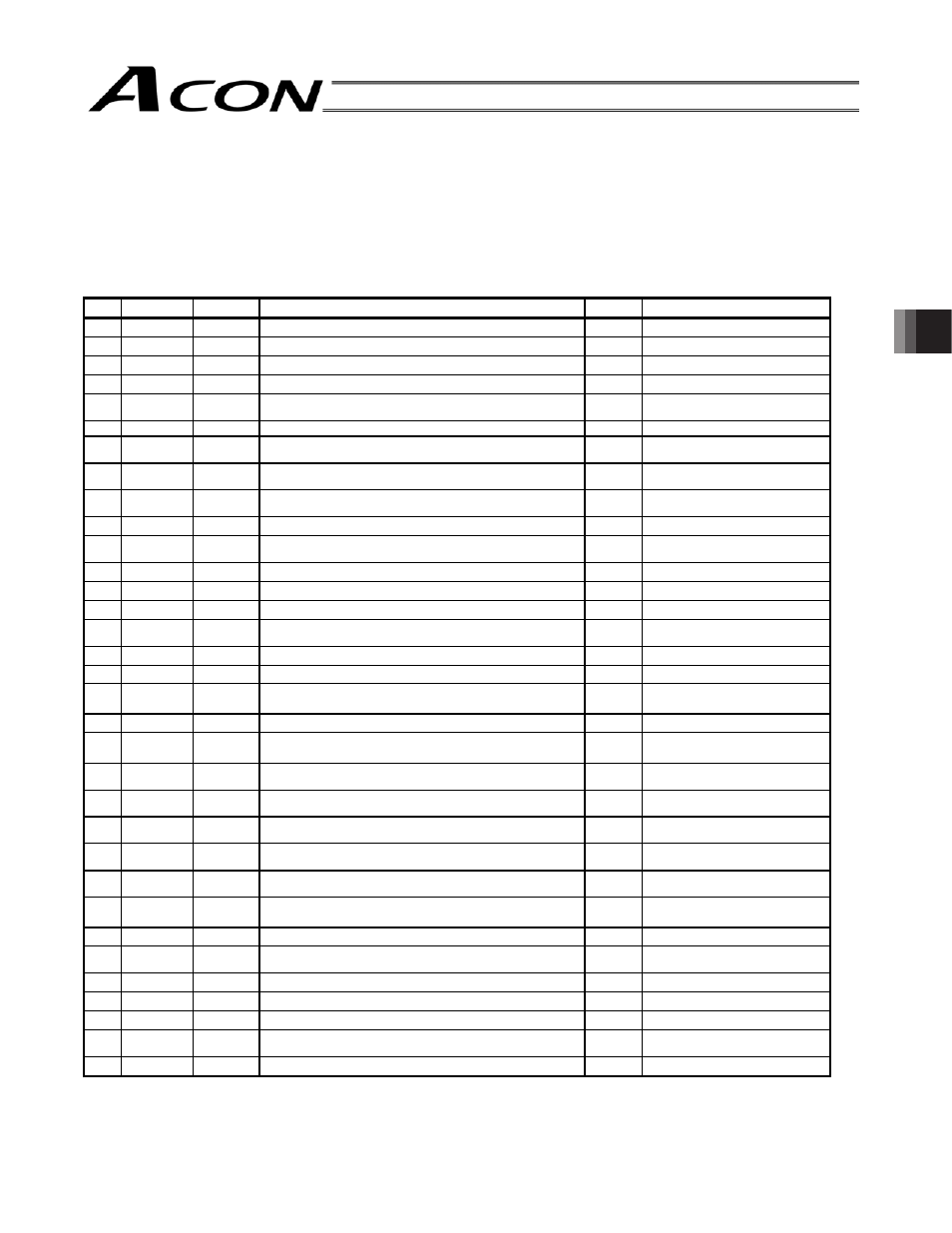
Parameters are classified into four types according to their content.
a:
Parameter relating to the actuator stroke range
b:
Parameter relating to the actuator operating characteristics
c:
Parameter relating to the external interface
d:
Servo gain adjustment
No. Category Symbol
Name
Unit
Default factory setting
1
a
ZONM Zone boundary 1+
mm
Effective actuator length
2
a
ZONL
Zone boundary 1-
mm
Effective actuator length
3 a LIMM
Soft
limit+
mm
Effective actuator length
4 a LIML
Soft
limit-
mm
Effective actuator length
5
a
ORG
Home return direction (0: Reverse/1: Forward)
(In accordance with the
specification at the time of order)
6
b
PSWT
Push & hold stop judgment period
msec
255
7
d
PLG0
Servo gain number
Set individually in accordance
with the actuator characteristics
8 b VCMD
Default
speed
mm/sec
Set individually in accordance
with the actuator characteristics
9 b ACMD
Default
acceleration/deceleration
G
Set individually in accordance
with the actuator characteristics
10 b INP
Default
positioning
band (in-position)
mm
0.10
13
b
ODPW Current-limiting value during home return
%
Set individually in accordance
with the actuator characteristics
16
c
BRSL
SIO communication speed
bps
38400
17
c
RTIM
Minimum delay time for slave transmitter activation
msec
5
18
b
AIOF
Home position sensor input polarity
0 (Invalid)
22
a
OFST
Home return offset
mm
Set individually in accordance
with the actuator characteristics
23
a
ZNM2
Zone boundary 2+
mm
Effective actuator length
24
a
ZNL2
Zone boundary 2-
mm
Effective actuator length
28 b PHSP1
Default movement direction for excitation-phase
signal detection (0: Reverse/1: Forward)
0 (Reverse)
29
b
PHSP2 Excitation-phase signal detection time
msec
128
30 b PHSP
Pole sense type (0: Current restraint/1: Distance
restraint)
1 (Distance restraint)
31
d
VLPG
Speed loop proportional gain
Set individually in accordance
with the actuator characteristics
32
d
VLPT
Speed loop integral gain
Set individually in accordance
with the actuator characteristics
33
d
TRQF
Torque filter time constant
Set individually in accordance
with the actuator characteristics
34 b PSHV
Push
speed
mm/sec
Set individually in accordance
with the actuator characteristics
35 b SAFV
Safety
speed
mm/sec
Set individually in accordance
with the actuator characteristics
39 c FPIO1
Position complete signal output method (0: PEND:
1: INP)
0 (PEND)
42
b
FPIO4
Enable function (0: Valid/1: Invalid)
1 (Invalid)
43
b
AIOF
Home position check sensor input polarity
(In accordance with the
specification at the time of order)
45 c SIVM
Silent
interval
magnification
times
0 (Invalid magnification)
46 b OVRD
Speed
override
%
100
52 b CTLF
Default
acceleration/deceleration mode
0 (Trapezoid)
54
d
CLPF
Current control band number
Set individually in accordance
with the actuator characteristics
55
b
PLPF
Position command primary filter time constant
msec
0