3 alarm description and cause/action – IAI America ACON-SE User Manual
Page 103
93
6. T
roubleshooting
6.3 Alarm Description and Cause/Action
(1) Operation-cancellation level alarms
Code Error
name
Cause/Action
080 Movement command during
servo OFF
Cause: A movement command was issued by numeric specification while
the servo was OFF.
Action: Issue a movement command after confirming the servo is ON (SV
RU3(1'LV³´
083 Numeric command during
home return non-completion
Cause: Numeric specification of the absolute position was performed
while home return was not yet completed.
(No problem in the position no. specification mode)
Action: Issue a movement command by numeric specification after
performing home return operation and confirming the complete
signal (HEND).
084 Movement command during
home return
Cause: A movement command was issued by numeric specification
during home return.
Action: Issue a movement command after performing home return
operation and confirming the complete signal (HEND).
085 Position No. error during
movement
Cause: Unregistered position number was specified in the position table in
the position no. specification mode.
Action: Recheck the position table.
090 Soft reset during servo ON
Cause: A soft reset command was received while the servo was ON.
Action: Send a soft reset command to the controller after confirming that
WKHVHUYRLV2))69LV³´
0A2 Position data error
Cause: [1] A movement command was issued when no target command
ZDVVHWLQWKH³3RVLWLRQ´ILHOG
>@ 7KHYDOXHRIWKHWDUJHWYDOXHLQWKH³3RVLWLRQ´ILHOGH[FHHGHG
the soft limit set value.
Action: [1] Set the target position first.
[2] Change the value of the target position to one within soft limit
set values.
0A3 Position command data error Cause: The speed or acceleration/deceleration value during numeric
VSHFLILFDWLRQH[FHHGHGWKHPD[LPXPVHWYDOXH
Action: Change the value to an appropriate one.
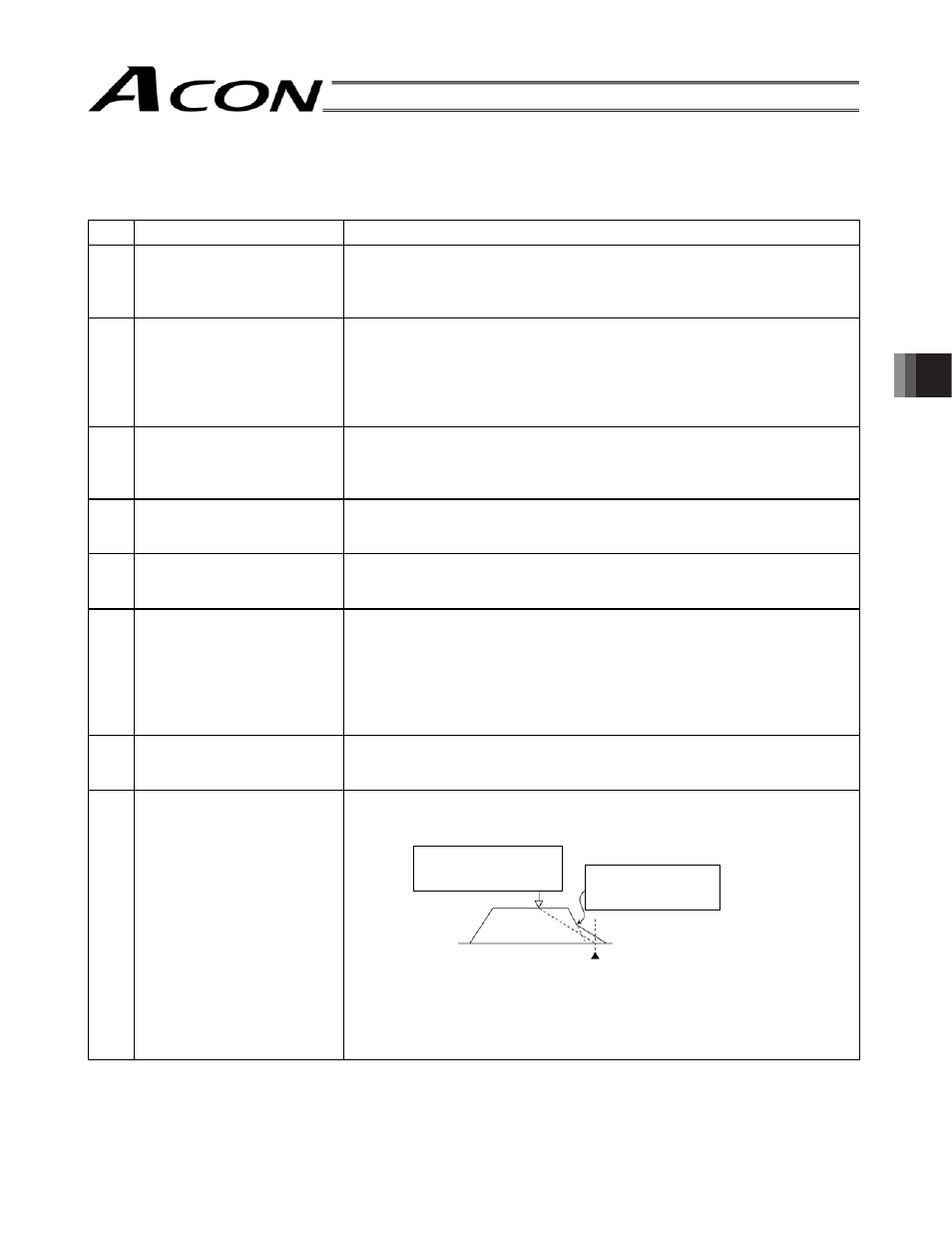
0A7 Deceleration command error If the target position is near a soft limit and the deceleration is set low,
issuing a command specifying the applicable position number while the
actuator is moving may cause the actuator to move past the soft limit.
Cause: When the speed is changed while the actuator is moving, the
QH[WPRYHFRPPDQGLVQRWLVVXHGTXLFNO\HQRXJK
Action: Quicken the timing of speed change so as to prevent the actuator
from overshooting beyond the soft limit.
Soft limit
Deceleration start position
that does not cause the
VRIWOLPLWWREHH[FHHGHG
If a command is issued
in this position, the soft
OLPLWLVH[FHHGHG