IAI America ACON-SE User Manual
Page 71
61
4. Description of Operating Functions
Ŷ
Position Complete (PEND)
This signal indicates that the target position has been reached, and turns ON in the following condition:
>@ 7KHRSHUDWLRQUHDG\VLJQDO69LV³´DQG
[2] The current position deviation from each target position is within the positioning band or
[3] Work is contacted (not missed) during push & hold operation.
This signal is used as a trigger signal to peripheral equipment when the target position is reached.
Since making the positioning band value larger quickens a command to peripheral equipment by that amount, it is
effective as a means to reduce the tact time of the entire system.
When the servo turns ON after the power is input, this
VLJQDOZLOOEHFRPH³´EHFDXVe that position becomes the
target position. The signal will beco
PH³´ZKHQSRVLWLRQLQJRSHUDWLRQVWDUWVZLWKWKH&675VLJQDODV³´
(Note) When the servo turns OFF or an emergency stop is actuated, PEN
'ZLOOEHFRPH³´RQFH
If the position deviation is within the positioning band when the servo is turned ON again, PEND will return
WR ³´ ,I &675 UHPDLQV ³´ 3(1' ZLOO QRW UHWXUQ WR ³´ HYHQ ZKHQ WKH FXUUHQW SRVLWLRQ GHYLDWLRQ IDOOV
ZLWKLQWKHSRVLWLRQLQJEDQGDQGEHFRPH³´DIWHU&675EHFRPHV³´
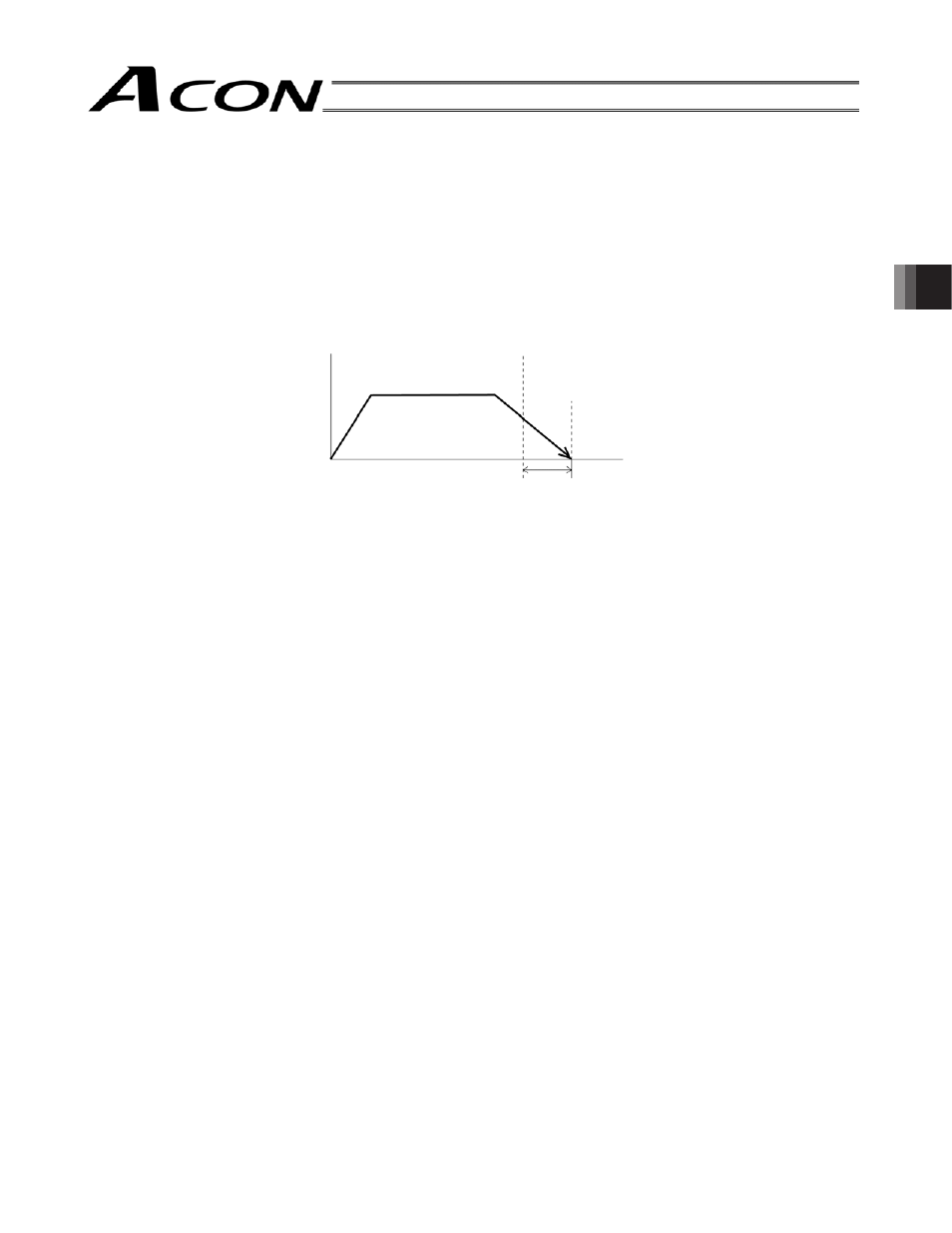
Speed
Timing of position complete
signal turning ON
Target
position
Time
Positioning
band
Moving distance