3 positioning operation – IAI America ACON-SE User Manual
Page 68
58
4. Description of Operating Functions
4.4.3 Positioning
Operation
)LUVWWXUQRQWKH9'&SRZHUVXSSO\DQGFRQILUPWKDWWKHSRVLWLRQFRPSOHWHVLJQDO3(1'LV³´E\UHIHUULQJWR
+RPHUHWXUQKDVQRWEHHQFRPSOHWHGLPPHGLDWHO\DIWHUWKHSRZHULVLQSXW,WLVUHTXLUHGWRSHUIRUPKRPH
UHWXUQE\LVVXLQJWKHKRPHUHWXUQFRPPDQG+20(DVGHVFULEHGLQ
,ISRVLWLRQLQJVWDUW&675VLJQDOLVRXWSXWE\VSHFLI\LQJDSRVition (position no. specification or direct specification
RISRVLWLRQGDWDSRVLWLRQLQJZLOOEHSHrformed to the specified position after performing home return operation.
3RVLWLRQLQJRSHUDWLRQLVGHVFULEHGEHORZE\WDNLQJWKHDFWXDWRUZLWKDVWURNHRIPPDVDQH[DPSOH
([DPSOHRISRVLWLRQWDEOH
No.
Position
[mm]
6SHHG
[mm/s]
Acceleration
[G]
Deceleration
[G]
Push
[%]
Positioning
EDQG
[mm]
Comment
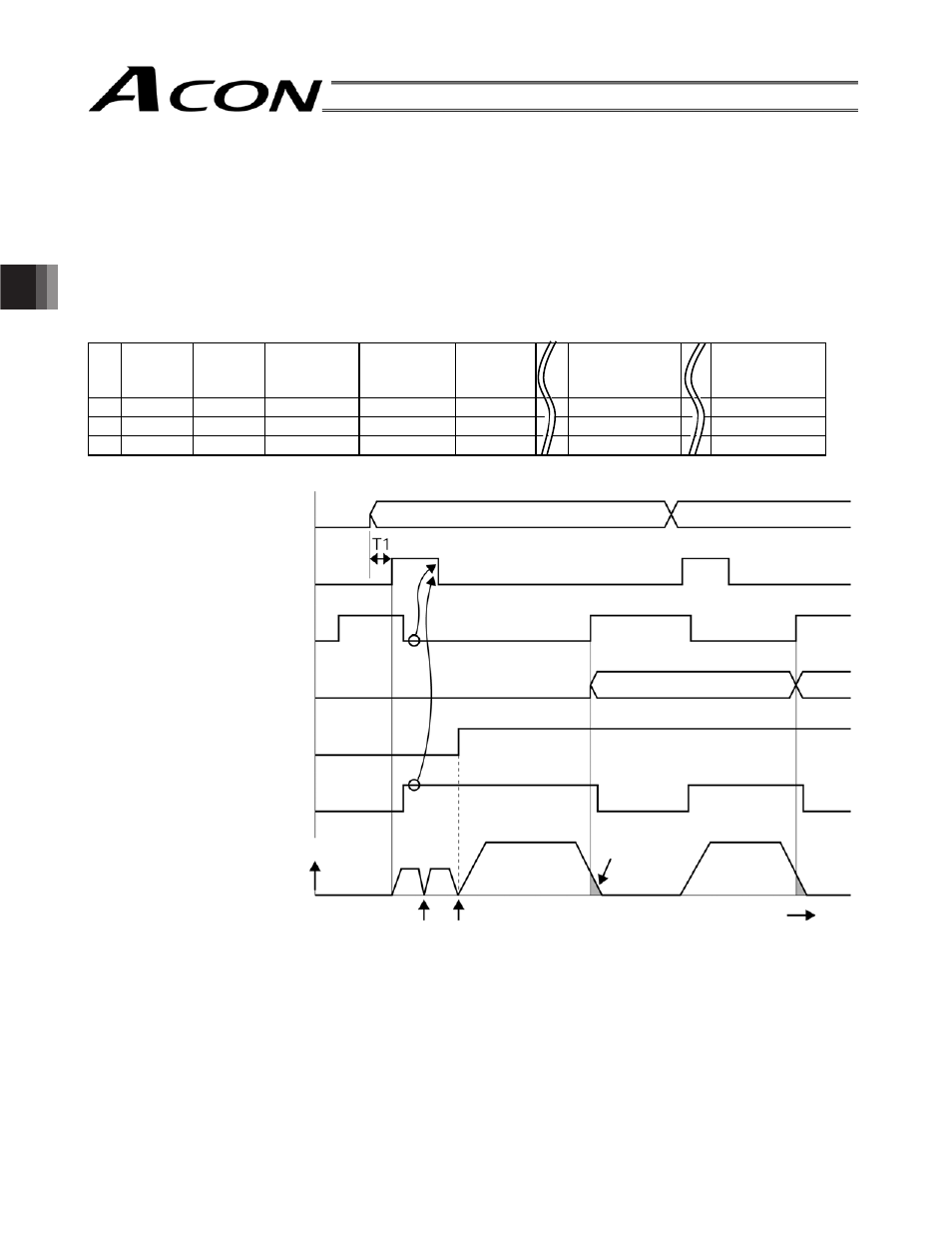
76HW7WRPVHFRUPRUHLQFRQVLGHUation of the scan time of the host controller.
Position command
3RVLWLRQLQJVWDUW&675
Position complete (PEND)
Position complete position
+RPHUHWXUQFRPSOHWLRQ+(1'
0RYLQJ029(
$FWXDWRUPRYHPHQW
6SHHG
3RVLWLRQ
Position 2
3RVLWLRQ
Position 2
3RVLWLRQLQJEDQG
7LPH
0HFKDQLFDOHQG
+RPHSRVLWLRQ
*