R&M Materials Handling HOIST MONITORS User Manual
Page 87
R&M Materials Handling, Inc.
4501 Gateway Boulevard
Springfield, Ohio 45502
P.: (937) 328-5100
FAX: (937) 325-5319
87/105
R&M Materials Handling, Inc. reserves the right to alter or amend the above information without notice.
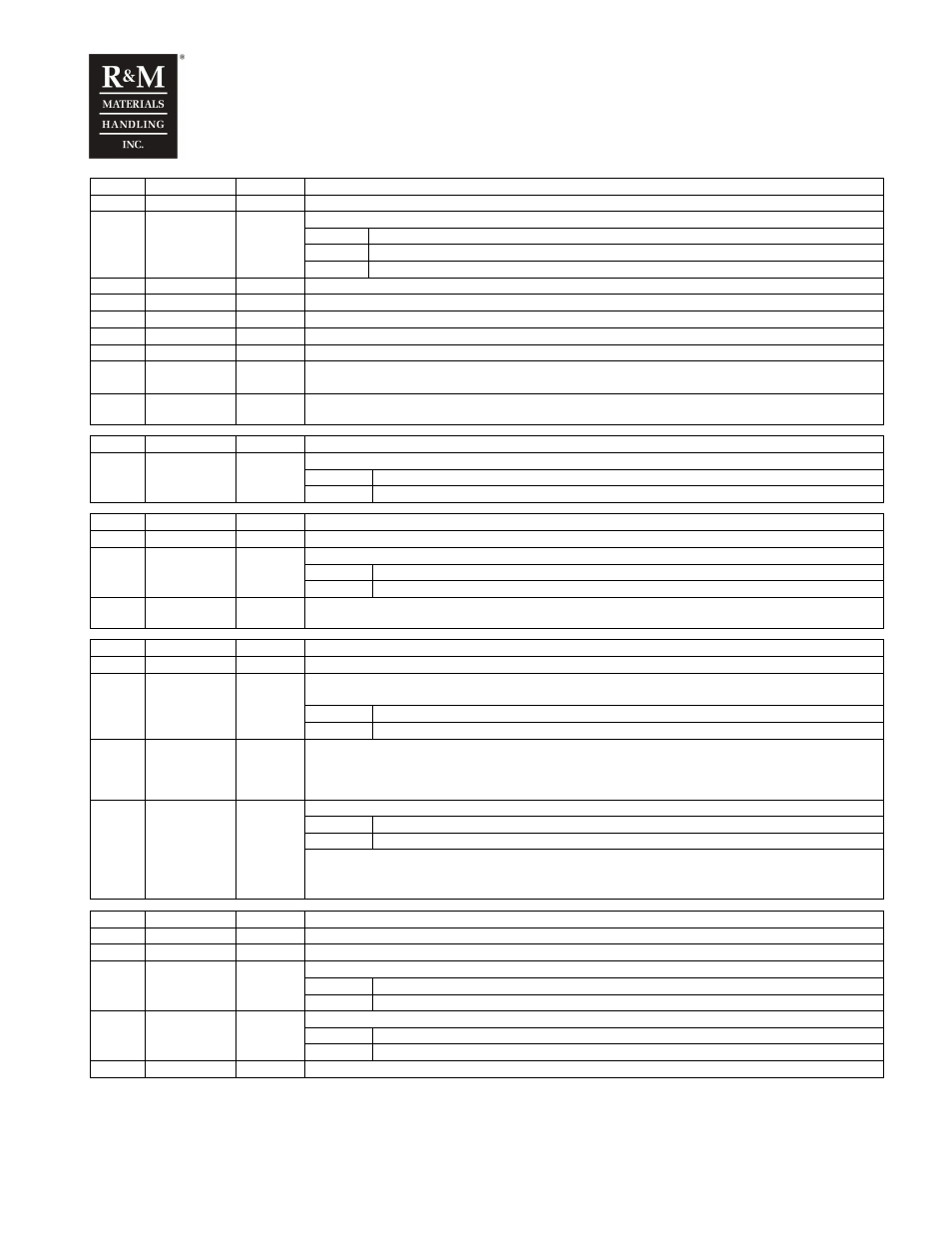
Param. Name
Value
Description
4-7
Load param
Load calculation parameters
Temperature measurement channel for the motor fast speed windings, used in motor torque calculation
T1
Temperature measurement channel T1 (terminals X2:21-22)
T2
Temperature measurement channelT2 (terminals X2:23-24)
4-7-7
Temp_fast
T2
NU
Temperature measurement not used
4-7-8
C2F
nnnn
Coefficient 2 for fast speed
4-7-9
C2S
nnnn
Coefficient 2 for slow speed
4-7-10
C1F
nnnn
Coefficient 1 for fast speed
4-7-11
C1S
nnnn
Coefficient 1 for slow speed
4-7-12
ki
nnnn
Reduction factor for current transformer [A/V]
4-7-13
Acc-t slow
0.20s
Acceleration time from stop to slow speed. Range 0.00…1.00 sec. See also chapter
“Starting and stopping through slow speed” of this manual
4-7-14
Acc-t fast
0.30s
Acceleration time from slow speed to fast speed. Range 0.00…1.00 sec. See also chapter “Starting
and stopping through slow speed” of this manual
Param. Name
Value
Description
The selection for the hoist control method
2-SP
Two step control
4-8
Hoist ctrl
INV
Stepless control (i.e. Inverter drives)
Param. Name
Value
Description
4-9
Slack rope
Slack rope function parameters
Selects the slack rope function
Yes
Selected
4-9-1
SR select
No
Not selected
4-9-2
Load limit
“nn.n” t
When “YES” is chosen with parameter 4-9-1, the slack rope limit is entered here (in tons). Range:
0…hoist rated load. Recommended value: 10…50% of rated load of the hoist.
Param. Name
Value
Description
4-10
Single sup
Selects the action when the motor temperature exceeds the limit or when
“Fault, Br wear” occurs
No
Both hoisting and lowering is prevented
4-10-1
OT run ?
No
Down
Hoisting is prevented, lowering is allowed
4-10-2
OT limit
“nnn” C
When NTC type sensor is applied (P4-4-1 and P4-5-1) the limit value for the hoist motor
overtemperature supervision in given here in degrees Celsius, with the resolution of one degree. When
the given limit is exceeded, the overtemperature supervision is triggered. Once activated, the
supervision remains active until the motor temperature has descended 30°C under the given limit value.
Selects the supply voltage supervision.
YES
Supply voltage supervision is active
NO
Supply voltage supervision is not applied
The supply voltage supervision checks the phase order and the presence of all phases (L1, L2 & L3)
In insulated or high impedance grounded networks, selection must be NO
4-10-3
Supply sup
YES
When the control method is stepless speed control (parameter 4-8 is “INV”), selection must be NO
Param. Name
Value
Description
4-11
Comm hoist
The settings for common hoisting (multi-hoist applications)
4-11-1
Hoist cnt
“n”
The number of units connected with CAN bus. Range: 1…5
Common hoisting supervision
YES
Run supervisions between hoists are active
4-11-2
Run sup.
NO
No run supervision between hoists
Bridge overload protection
YES
active
4-11-3
B OL
NO
not active
4-11-4
B nom load
“nn.n” t
Rated load of the bridge