3 specifications – Adept s1700D Viper User Manual
Page 77
Robot Flange Dimensions
Adept Viper s1700D Robot User’s Guide, Rev A
77
6.3
Specifications
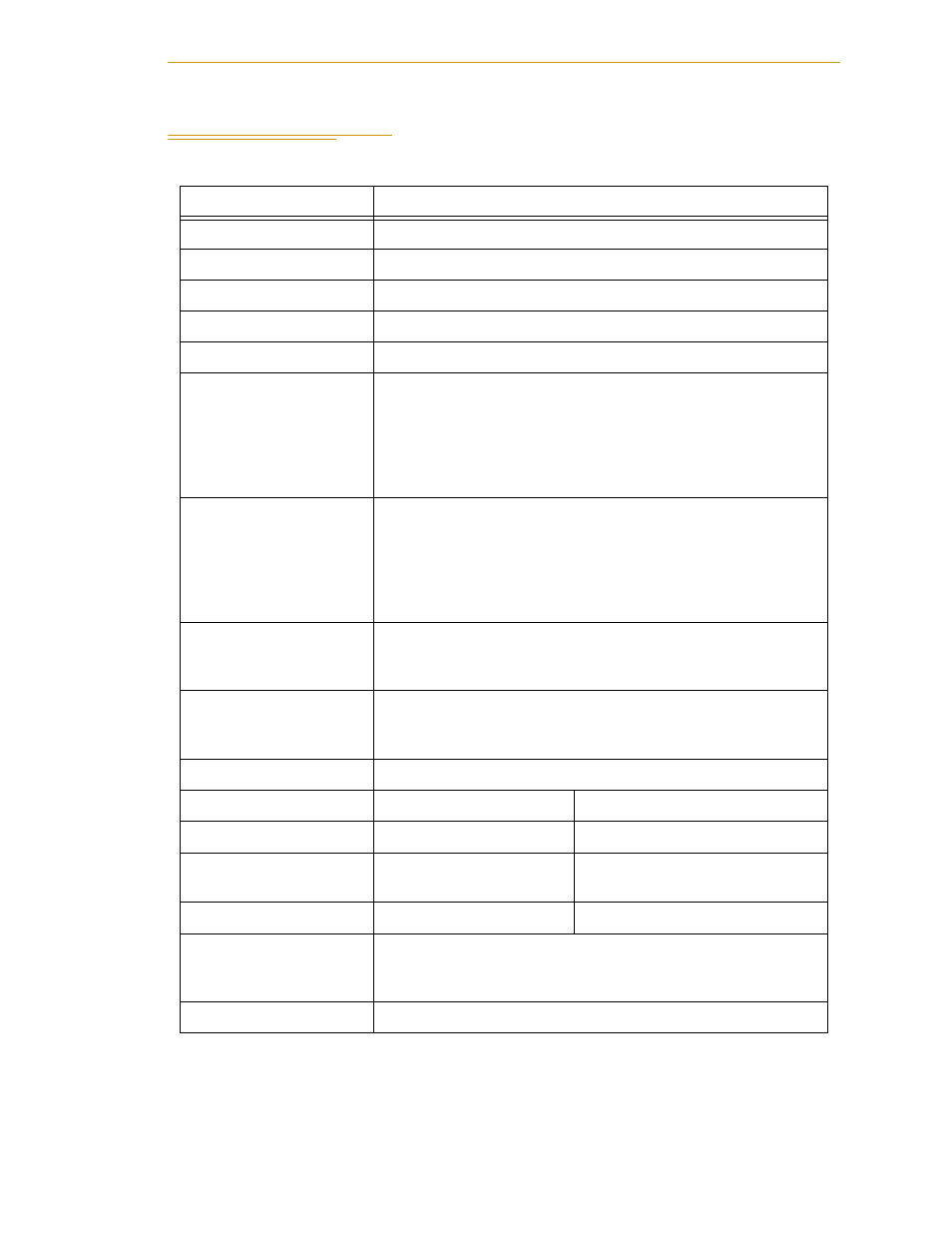
Table 6-1. Robot Specifications
Specification
Value
Configuration
Vertically articulated
Degrees of freedom
6
Payload
20 kg
Reach
1717 mm
Position repeatability
a
a
Position repeatability is the value at constant ambient temperature.
±0.06 mm
Motion range
J1: ±180° (turning)
J2: -110°, +155° (lower arm)
J3: -165°, +255° (upper arm)
J4: ±200° (wrist roll)
J5: -50, +230° (wrist pitch/yaw)
J6: ±360° (wrist twist)
Maximum speed
J1: 3.44 rad/s, 197°/s
J2: 2.97 rad/s, 170°/s
J3: 3.26 rad/s, 187°/s
J4: 6.98 rad/s, 400°/s
J5: 6.98 rad/s, 400°/s
J6: 10.47 rad/s, 600°/s
Allowable moment
b
b
for details on allowable moment and inertia.
J4: 39.2 N•m (29 ft•lbf)
J5: 39.2 N•m (29 ft•lbf)
J6: 19.6 N•m (14.5 ft•lbf)
Allowable inertia
(GD
2
/
4
)
b
J4: 1.05 kg•m
2
J5: 1.05 kg•m
2
J6: 0.75 kg•m
2
Weight
Approx. 268 kg (590 lbs)
During Operation
During Shipment/Storage
Temperature
0° to 45° C (32° to 113° F)
-10° to 60° C (14° to 140° F)
Humidity
20 to 80% RH
(at constant temperature)
less than 75% RH,
non-condensing
Vibration acceleration
less than 4.9 m/s
2
(0.5 G)
less than 29.4 m/s
2
(3.0 G)
Other ambient conditions
Free from corrosive gasses or liquids, or explosive gasses
Clean and dry
Free from excessive electrical noise (plasma)
Power requirements
2.0 kVA
c
c
For typical power consumption information, see