9 removing the encoder connector, Figure 5-10. 4th-axis cross roller bearing diagram, Section 5.9 on – Adept s1700D Viper User Manual
Page 69
Removing the Encoder Connector
Adept Viper s1700D Robot User’s Guide, Rev A
69
5.8
Grease Replenishment for 4th-Axis Cross Roller Bearing
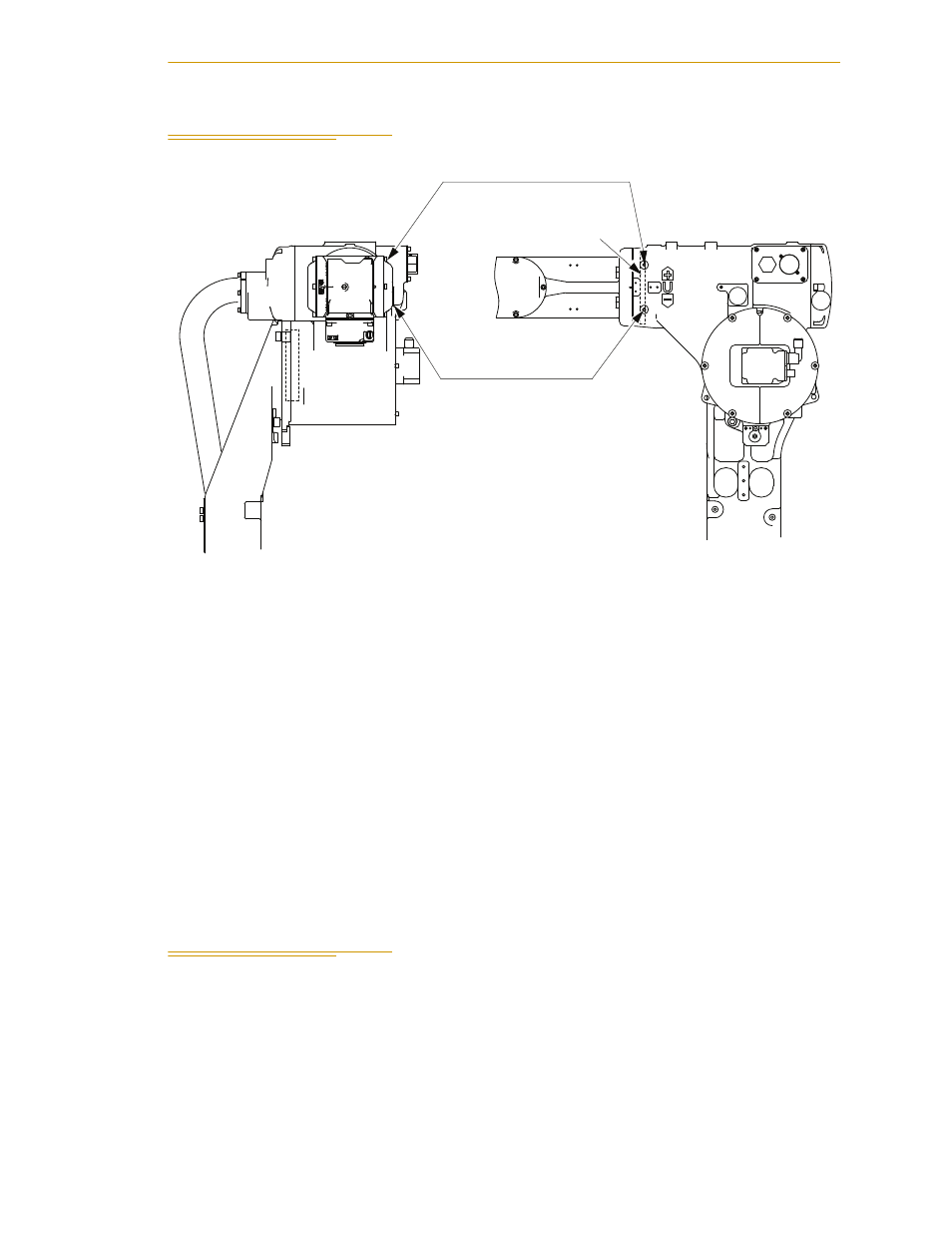
Figure 5-10. 4th-Axis Cross Roller Bearing Diagram
1. Remove the plug on the exhaust port.
2. Remove the hexagon socket head cap screw from the grease inlet and install the
grease zerk (A-MT6X1).
3. Inject the grease (8 cc (16 cc for first supply, Alvania EP grease 2) into the grease
inlet using a grease gun.
NOTE: The exhaust port is used for air flow. Do no inject excessive grease
into the grease inlet.
4. Reinstall the plug on the exhaust port. Prior to installation, coat the screw threads
with Three Bond 1206C.
5. Remove the grease zerk on the grease inlet and reinstall the hexagon socket head
cap screw. Prior to installation, coat the screw threads with Three Bond 1206C.
5.9
Removing the Encoder Connector
When performing maintenance, such as replacing a wire harness in the robot, it may be
necessary to remove the encoder connector (note the CAUTION label). In this case, be
sure to connect the battery pack to the battery backup connector before removing the
encoder connector. If you remove the encoder connector without connecting the battery
backup, the encoder absolute data might be lost. For instructions on making the battery
pack connections, see
Grease inlet
Exhaust port
(Plug LP-M5)
4th-axis cross roller bearing
(Hexagon socket head cap
screw M6) (Length: 6 mm)