Wrist tool flange, Figure 2-14. moment arm rating – Adept s1700D Viper User Manual
Page 36
Robot Installation
36
Adept Viper s1700D Robot User’s Guide, Rev A
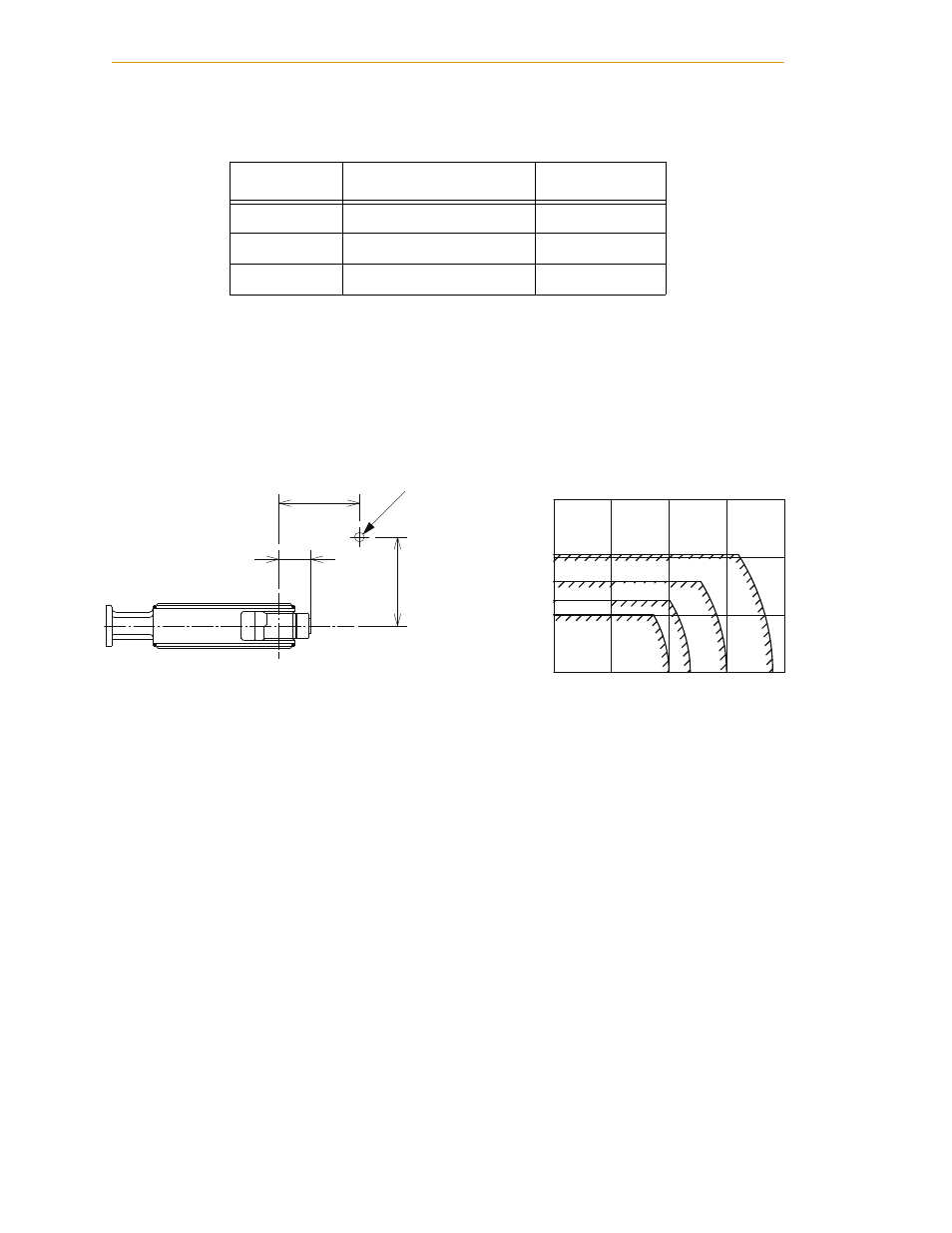
When the volume load is small, refer to the moment arm rating shown in
The allowable inertia is calculated when the moment is at the maximum. Contact Adept
Customer Service when only load moment is small and inertia moment is large. Also,
contact Customer Service when the load mass is combined with an outside force.
Figure 2-14. Moment Arm Rating
Wrist Tool Flange
for the dimensions of the wrist tool flange. To see the alignment marks, it
is recommended that the attachment be mounted inside the fitting. The fitting depth of
the inside and outside fittings must be 5 mm or less.
NOTE: Use thinner or light oil to clean off the anti-corrosive material on
the tool flange area prior to mounting the end-of-arm tooling.
NOTE: Mount the attachment with the mounting bolts (length: 10 mm or
less). Failure to due this may affect robot performance.
Table 2-4. Allowable Moment and Inertia
Axis
Moment N•m (ft•lbf)
a
a
(): Gravitational unit
Inertia kg•m
2
4th axis
39.2 (29.0)
1.05
5th axis
39.2 (29.0)
1.05
6th axis
19.6 (14.5)
0.75
L
L
105
T
B
400
300
W=6Kg
W=10Kg
200
100
200
100
0
W=20Kg
W=16Kg
300
L
T
(
mm
)
LB (mm)
5th-axis rotation center line
6th-axis, 4th-axis
rotation center line
Load gravity
position