6 intended use of the robot, 7 installation overview, 8 manufacturer’s declaration – Adept s1700D Viper User Manual
Page 15: Section, See “manufacturer’s
Intended Use of the Robot
Adept Viper s1700D Robot User’s Guide, Rev A
15
1.6
Intended Use of the Robot
The Adept Viper s1700D robot is intended for use in parts assembly and material
handling for payloads not to exceed 20 kg. See
for complete information on
tooling and payloads.
1.7
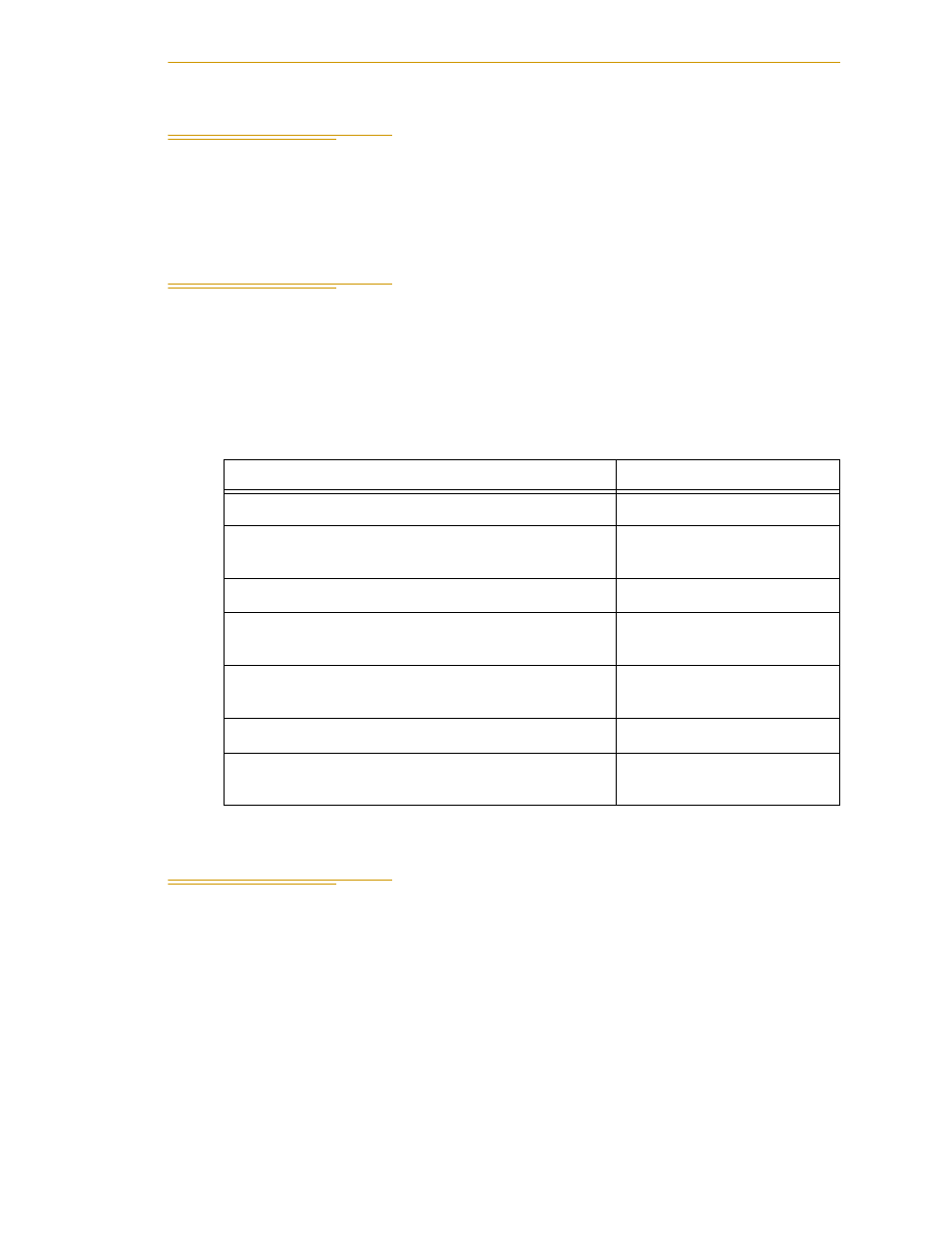
Installation Overview
The system installation process is summarized in the following table. Refer also to the
system cable diagram in
.
NOTE: For dual-robot installations, see the
Adept Viper Dual Robot
Configuration Procedure
, which is available in the Adept Document
Library.
1.8
Manufacturer’s Declaration
The Manufacturer’s Declaration of Incorporation and Conformity lists all standards for
which the Adept Viper robot system complies. It can be found on the Adept Web site, in
the Download Center of the Support section.
ftp://ftp1.adept.com/Download-Library/Manufacturer-Declarations/
Each Manufacturer's Declaration is supplied in PDF format and stored on the website in a
ZIP archive. To access the PDF document:
1. Click on the appropriate .zip file. You are prompted to Open or Save the file.
2. Click Open to open the file and display the archive contents.
Table 1-2. Installation Overview
Task to be Performed
Reference Location
1. Mount the robot on a flat, secure mounting surface.
See
2. Install the SmartController, Front Panel, and Adept
ACE software.
See
3. Install the PA-4 power chassis.
See
4. Install the IEEE 1394 and XSYS cables between
the PA-4 and SmartController.
See
5. Install the Power and Encoder cables between the
PA-4 and the robot.
See
6. Connect AC power to the PA-4 power chassis.
See
7. Start the Adept ACE software, connect to the
controller, and turn on power to the system.
See