Mounting the robot base – Adept s1700D Viper User Manual
Page 28
Robot Installation
28
Adept Viper s1700D Robot User’s Guide, Rev A
Mounting the Robot Base
Mount the robot on a base or foundation strong enough to support the robot and
withstand repulsion forces during acceleration and deceleration. Refer to
and
to construct a solid foundation with the appropriate thickness to withstand
maximum repulsion forces of the robot. During installation, if the flatness is not correct,
the robot shape may change and its functional ability may be compromised. The flatness
for installation must be kept at 0.5 mm or less. Mount the robot base as described below.
1. Fix the base plate with the anchor bolts on the floor. The base plate should be
rugged and durable. It is recommended that the thickness of the base plate be
32 mm or more and the anchor bolt size be M16 or larger.
2. Fix the robot base with the hexagon socket head cap screws on the base plate.
3. There are four mounting holes on the robot base. Fix the robot securely with the
hexagon socket head cap screws M16 (60 mm long recommended; tensile
strength: 1200 N/mm
2
or above). Tighten the bolts to 206 N•m torque.
NOTE: Tighten the anchor bolts and hexagon socket head cap screws
securely so that they do not work loose during operation.
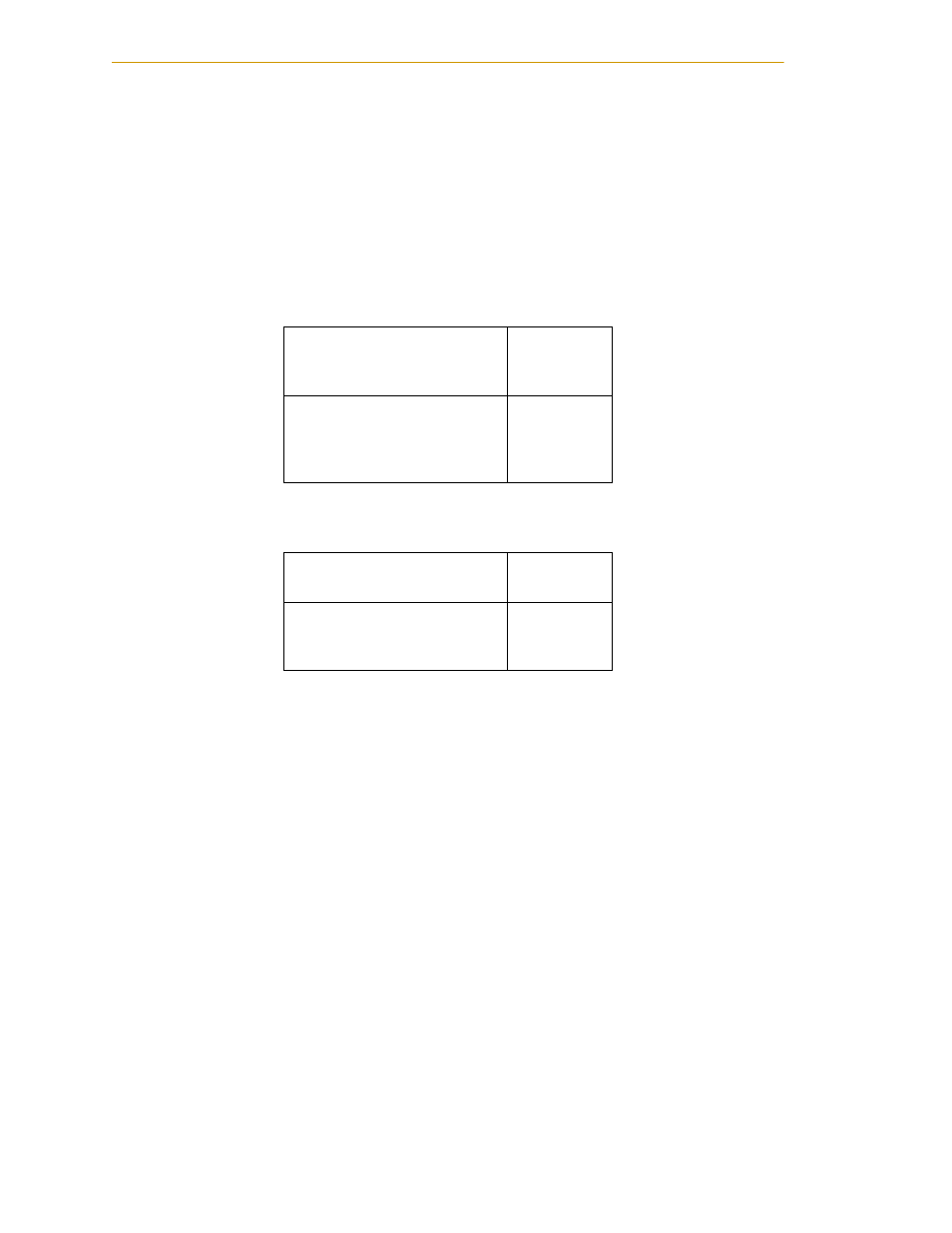
Table 2-2. Maximum Repulsion Forces of Robot at Emergency Stop
Maximum horizontal rotating
torque
(direction of motion Axis 1)
8000 N•m
(5900 ft•lbf)
Maximum vertical rotating
torque
(direction of motion Axes 2
and 3)
5000 N•m
(3688 ft•lbf)
Table 2-3. Endurance Torque in Operation
Maximum horizontal torque
(direction of motion Axis 1)
1700 N•m
(1254 ft•lbf)
Maximum vertical torque
(direction of motion Axes 2
and 3)
3775 N•m
(2784 ft•lbf)