External mounting locations on robot, Allowable load, Installation position – Adept s1700D Viper User Manual
Page 34: Allowable load installation position, Figure 2-12. installing external equipment mounts
Robot Installation
34
Adept Viper s1700D Robot User’s Guide, Rev A
External Mounting Locations on Robot
When attaching external equipment to the 3rd axis, install the equipment as described in
this section.
Allowable Load
The maximum allowable load on the 3rd axis is 31 kg, including the wrist load. For
example, when the mass installed on the wrist point is 20 kg, the allowable mass that can
be installed on the upper arm is 11 kg.
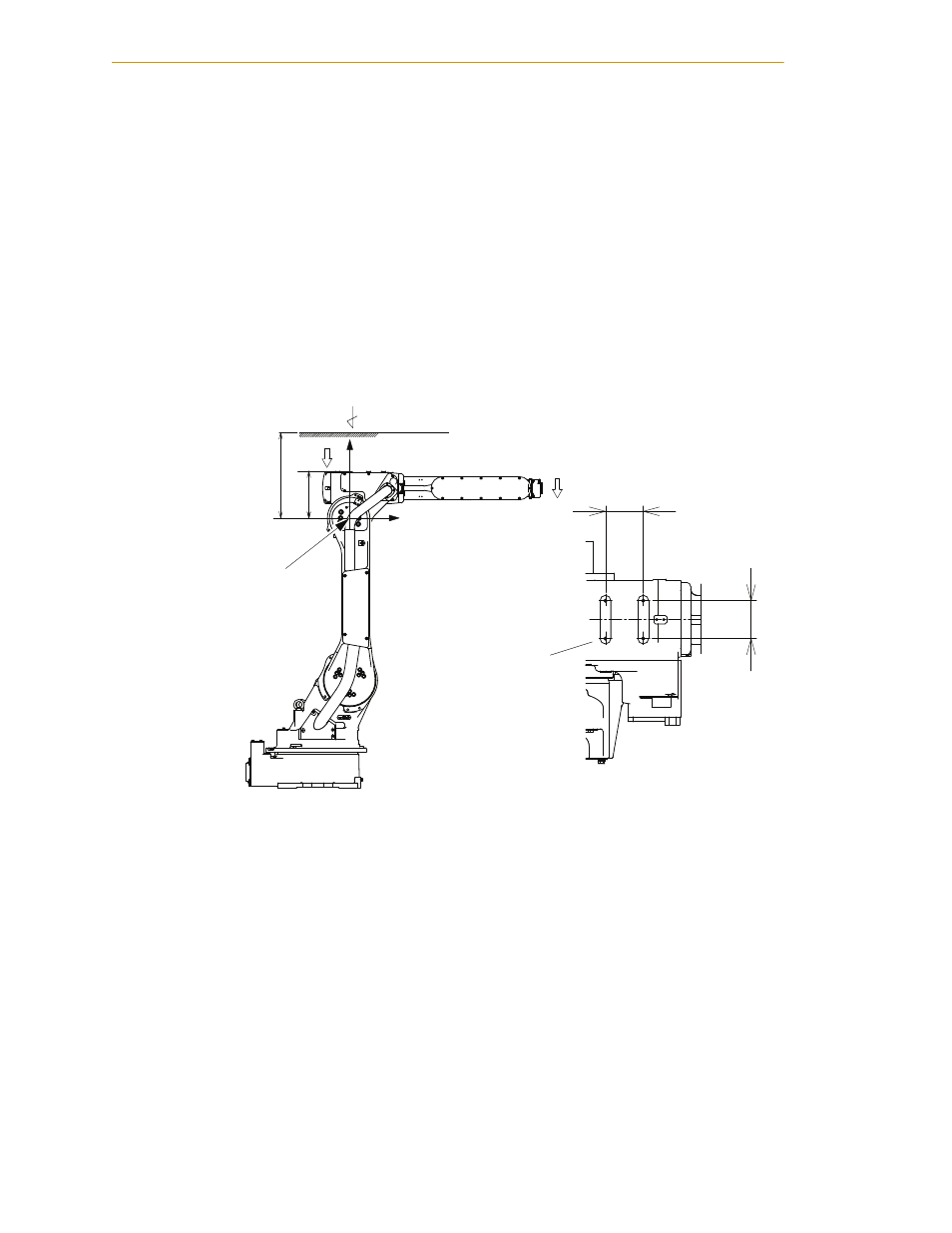
Installation Position
Observe the limitations on the installation position shown in
.
shows the distance between the center of the 3rd-axis rotation and the load gravity.
Figure 2-12. Installing External Equipment Mounts
W1
W2
70
70
220
A
View A
Units: mm
Z-coordinate
direction
Center of 3rd-axis rotation
Limited dimension
of Z-
coordinate:
400 at a maximum
X-coordinate
direction
Tapped holes M6
(depth: 10)
(pitch: 1.0) (4 holes)