9 designing end-effectors, Mass of end-effector, Figure 2-13. allowable load on third axis – Adept s1700D Viper User Manual
Page 35
Designing End-Effectors
Adept Viper s1700D Robot User’s Guide, Rev A
35
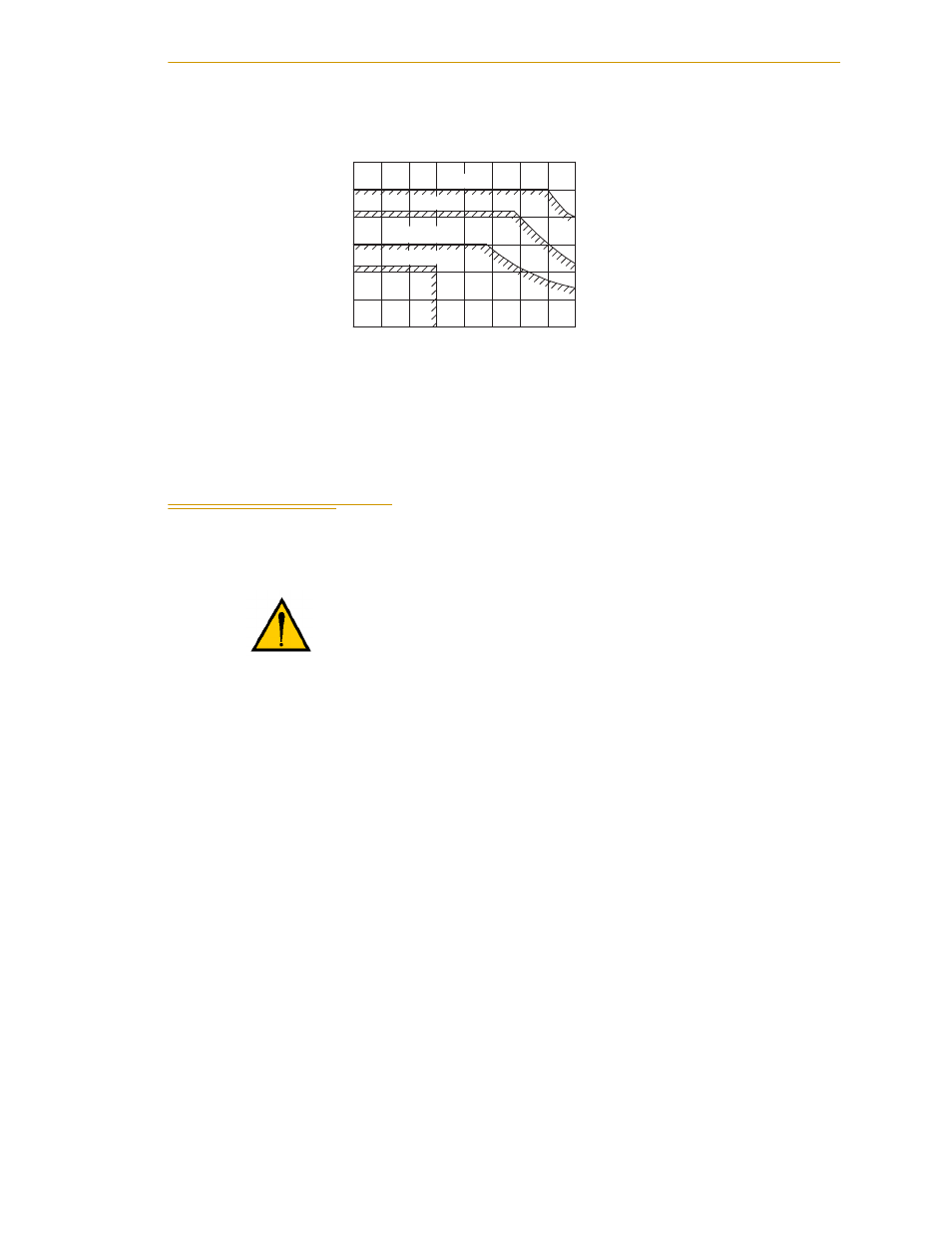
Figure 2-13. Allowable Load on Third Axis
2.9
Designing End-Effectors
Design an end-effector such that it is in compliance with items described in this section.
Mass of End-Effector
Design the end-effector so that the total mass of the end-effector (including workpiece)
will be lighter than the maximum payload capacity of the robot. The total mass includes
the wiring, tubing, etc.
Maximum total mass of the end-effector (including workpiece) must be less than or equal
to the maximum payload capacity (20 kg).
If force is applied to the 5th axis instead of the payload, force on the 4th, 5th, and 6th axes
should be within the values shown in
. Contact Adept Customer Service for
additional information.
CAUTION:
If the end-effector design precautions are not
observed, the clamped parts of the robot may become
loose, rattle, or be out of position. In the worst case, the
mechanical parts of the robot and robot controller may
become damaged.
(mm)
500
200 300 400
30
(kg)
W1=16kg
20
10
W1=20kg
100
0
0
-200 -100
W1=10kg
W1=6kg
Distance between Center of 3rd-axis
Rotation and Load Gravity (
X direction)
*1 In this case, unbalanced
moment is not permitted
Weight W2
*1