Axis naming conventions, Adept smartcontroller cx – Adept s1700D Viper User Manual
Page 12
Introduction
12
Adept Viper s1700D Robot User’s Guide, Rev A
Axis Naming Conventions
The robot’s six axes are referred to throughout this documentation as either Axis 1-6 or
Joint (J) 1-6. These terms are used interchangeably. For legacy reasons, these axes are
labeled on the robot as S-axis, L-axis, U-axis, R-axis, B-axis, and T-axis. The table below
shows how these current axis labels correspond to the legacy labels.
for a drawing that identifies the various axes.
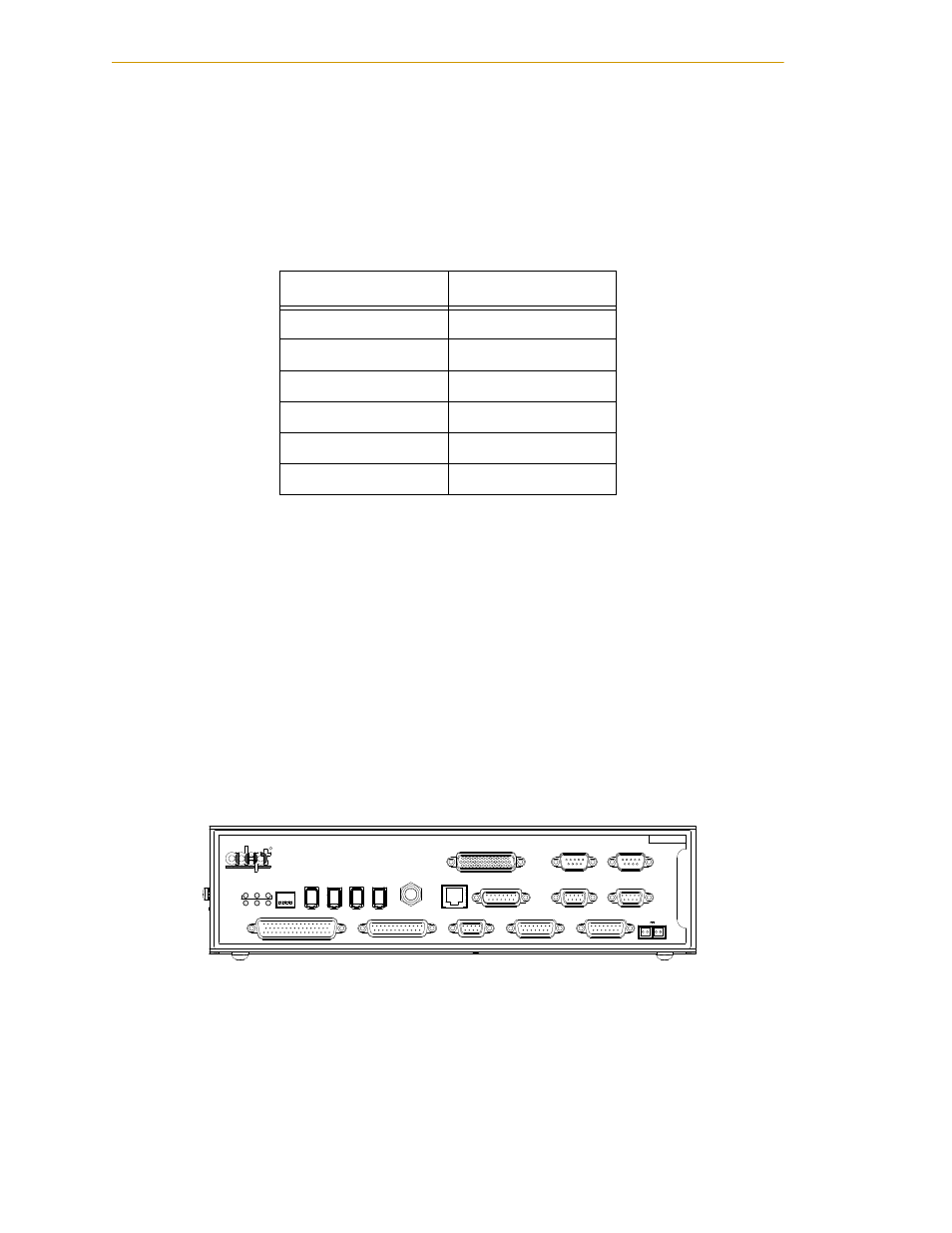
Adept SmartController CX™
The SmartController CX motion controller is the foundation of Adept’s family of
high-performance distributed motion controllers. The SmartController CX is designed for
use with Adept Cobra s600 and s800 robots, Adept Python Modules, Adept Viper robots,
Adept Quattro robots, and the Adept sMI6 Module for the SmartMotion product.
The SmartController CX supports a conveyor-tracking option. It offers scalability and
support for IEEE 1394-based digital I/O and general motion expansion modules. The
IEEE 1394 interface is the backbone of Adept SmartServo, Adept's distributed controls
architecture supporting Adept products. The controller also includes Fast Ethernet and
DeviceNet.
Figure 1-2. Adept SmartController CX Motion Controller
Table 1-1. Axis Naming Conventions
Current Axis Labels
Legacy Axis Labels
1st Axis (J1)
S-axis
2nd Axis (J2)
L-axis
3rd Axis (J3)
U-axis
4th Axis (J4)
R-axis
5th Axis (J5)
B-axis
6th Axis (J6)
T-axis
R
ON
SmartServo
IEEE-1394
1 2 3 4
SF
ES
HD
SW1
1.1
1.2
2.1
2.2
OK
1
2
3
XDIO
LAN
HPE
OFF
XSYS
CAMERA
Eth 10/100
XUSR
Device Net
XFP
RS-232/TERM
RS-232-1
XMCP
BELT ENCODER
SmartController
CX
-+
-+
RS-422/485
XDC1 XDC2
24V
5A
*S/N 3562-XXXXX*
RS-232-2