Standard specifications, 1 common standarsd specifications – Hitachi J300U Series User Manual
Page 89
11-1
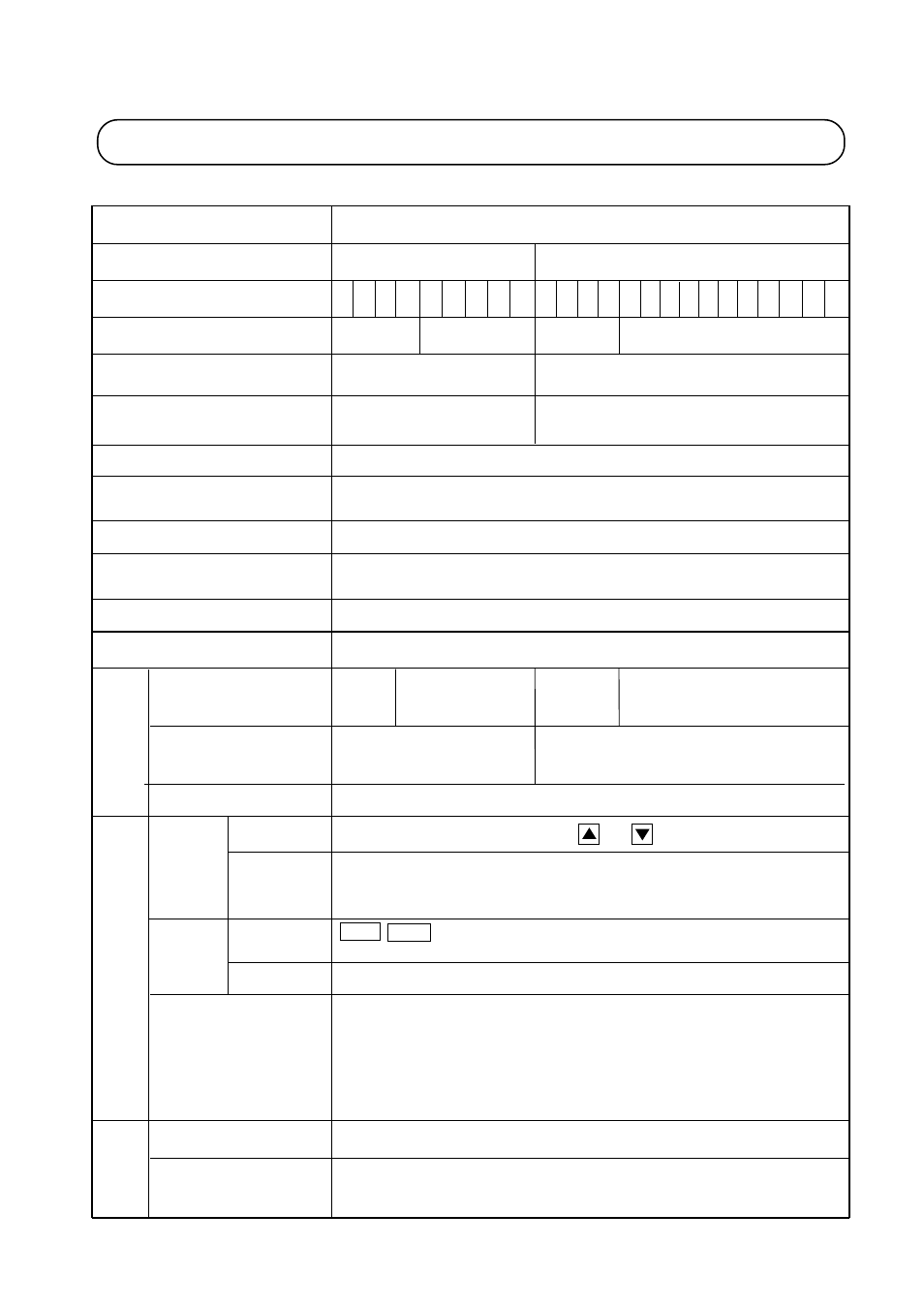
11. STANDARD SPECIFICATIONS
11.1
Common Standarsd Specifications
Item
Enclosure (NOTE 1)
Rated AC input power supply (V)
Rated output voltage (V) (NOTE 2)
Output frequency range (NOTE 3)
Frequency accuracy
Frequency setting resolution
Voltage/frequency characteristics
Acceleration/deceleration time
Description
Input voltage
Model Name (Type)
200 V class
400 V class
055
LF
075
LF
110
LF
150
LF
220
LF
300
LF
370
LF
450
LF
550
LF
055
HF
075
HF
110
HF
150
HF
220
HF
300
HF
370
HF
450
HF
550
HF
Semienclosed
type (IP20)
Open type (IP00)
Open type (IP00)
Semienclosed
type (IP20)
Three-phase (3 wires), 200 to 220 or
200 to 230 V±10%, 50 or 60 Hz±5%
Three-phase (3 wires), 380 to 415 or
400 to 460 V±10%, 50 or 60 Hz±5%
Three-phase, 200 to 230 V
(Corresponding to the input voltage)
Three-phase, 380 to 460 V
(Corresponding to the input voltage)
0.1 to 400 Hz
Digital command ±0.01% and analog command ±0.1% for the maximum
frequency command
Digital setting: 0.01 Hz/60 Hz, Analog setting: Maximum frequency/1000
V/f variable, high start torque, standard starting torque (constant torque,
reduced torque)
0.01 to 3000 seconds, acceleration and deceleration individually set
Input
signals
Frequency
setting
Digital operator
Forward/
reverse
run,
stop
Set by and
1
2
External signals
2 W 500
Ω
to 2 k
Ω
potentiometer, 0 to 5 VDC (nominal),
0 to 10 VDC (nominal) (input impedance 30 k
Ω
), 4 to 20 mA (nominal)
(input impedance 250
Ω
)
Digital operator RUN / STOP (Only for forward run or reverse run, the function mode
should be switched.)
External signals FW (forward run command)/stop
Intelligent input terminal
REV (reverse run command), FRS (free run stop command), CF1 to CF3
(multistage speed setting), USP (USP function), JG (jogging command),
CH1 (2-stage acceleration and deceleration), DB (external DB command),
RS(reset input), STN (initialization), SFT (software lock), AT (current input
selection), CS (commercial power source switching), SET (2nd setting
selection), EXT (external trip), UP (remote control, acceleration),
DOWN (remote control, deceleration)
Intelligent output terminal
FA1 (speed arrival signal), RUN (signal during run), OTQ (overtorque signal)
Frequency monitoring
Analog output frequency monitor (0 to 10 VDC full scale,1mA max.), digital
frequency signal by remote operator, analog current monitor, analog torque
monitor
Output
signals
Starting torque (NOTE 4)
Brak-
ing
torque
Dynamic braking
(NOTE 5)
Feedback to capacitor
DC injection braking
Dynamic braking using
external resistor or unit
(BRD)
150% or more (1 Hz)
About
20%
About 10 to 20%
About 20%
About 10 to 15%
Braking resistor optional for 055 and
075H, use braking unit (BRD) for
220 to 2200H.
Operated at the DC braking frequency or by external input
750
HF
1100
HF
900
HF
Braking resistor optional for 055 and
075L, use braking unit (BRD) for
220 to 550L.
2200
HF
1600
HF
1320
HF