Hitachi J300U Series User Manual
Page 117
A-5
Running method by autotuning data
When running the inverter using the autotuning data:
1. A-0 : The control method is set at SLV (sensorless vector control).
2. A-98
: The motor data is set on the autotuning side by the software switch.
Make the above two settings.
NOTE: When no torque is outputted during the sensorless vector run after the above settings are
made, make the following settings. Increase the set value of R1 of each remote operator
(motor constant) before starting running.
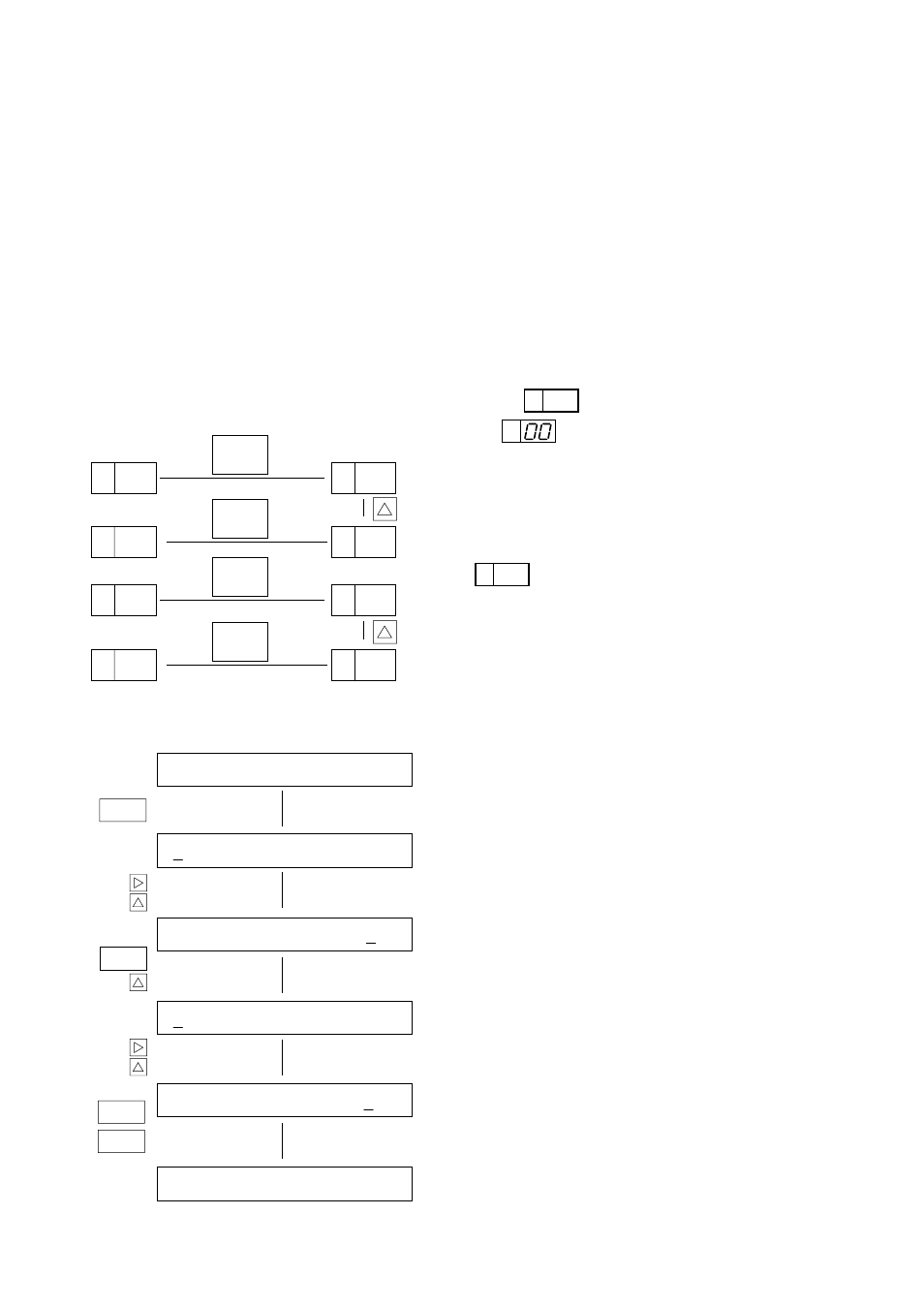
[Setting method]
(1) Digital operator
(2) Remote operator
➤
➤
➤
FUNC
FUNC
0
A
0
4
A
0
×
4
➤
➤
➤
FUNC
FUNC
00
A
98
02
A
98
×
2
1. Select [SLV] (sensorless vector control) by the
F-04 control method.
VC: Constant torque characteristic
VP1: Reduced torque characteristic (1.5 power)
VP2: Reduced torque characteristic (1.7 power)
VP3: Reduced torque characteristic (2.0 power)
SLV: Sensorless vector control
2. Set the [AUT] autotuning data by motor data
selection of the F-05 motor constant.
By the above two settings, running by the autotuning
data is available.
➤
➤
F-04
CONTROL
CONTROL
VC
CONTROL
SLV
FS050.00
000.00Hz
FUNC
STR
MON
×
4
➤
AUX
NOR
DATA
STR
×
2
➤
AUX
AUT
DATA
➤
Initial display
Initial display
×
2
1. Select
4 (sensorless vector control) by
the
control method.
0: Constant torque characteristic
1: Reduced torque characteristic (1.5 power)
2: Reduced torque characteristic (1.7 power)
3: Reduced torque characteristic (2.0 power)
4: Sensorless vector control
2. Set the motor constant data to the data which is
9 8
A
measured by the autotuning function
using the software switch.
(Refer to the [A98] software switch of the opera-
tion manual.)
(When executing the second setting, change the
switch.)
By the above two settings, running by the autotuning
data is available.