Adept DeskTop 4.3 User Manual
Page 86
Adept DeskTop 4.3 - Online Help
86
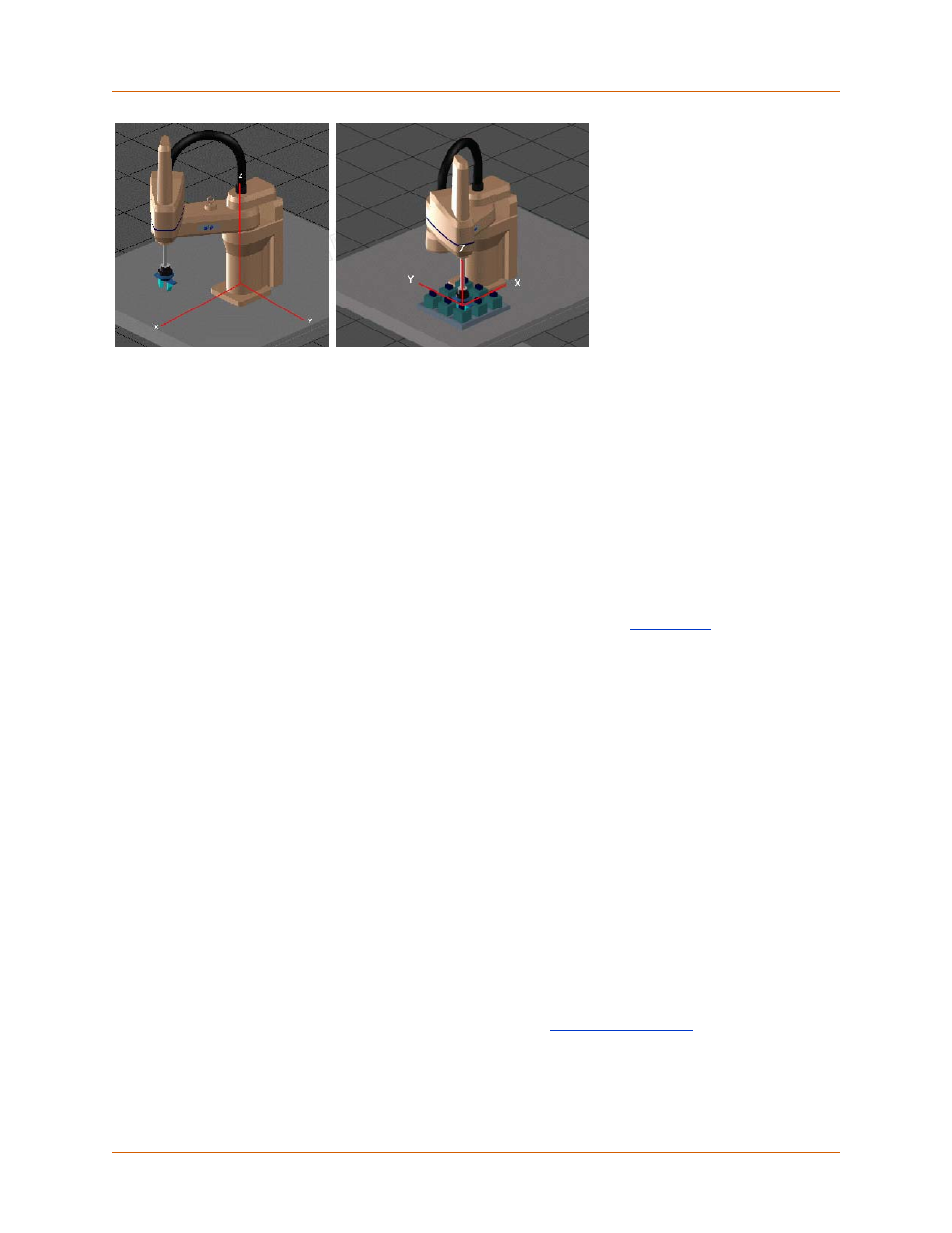
Figure 57 Illustration of a Simple Pallet Frame of Reference
Creating a Frame of Reference
You can create a frame of reference by following the procedure below. Note that you can also create a
frame using the Teach Frame Wizard.
To create a frame of reference:
1. Enter a common name for the new frame in the Frame Name field. This name should allow you
to easily identify the purpose/use of the frame. You can also select an existing name and edit the
selected frame. This is optional, but useful if you intend to use this frame for further reference.
2. Provide the location of three points in the Frame, described by the
3. You can also provide the Base Points from existing variables or from the current robot position:
• To define a base point from a variable, click Browse and select an appropriate transform
variable from the Variable Browser.
• To define a base point from the current position of a robot, select the robot (number), and
click Record.
4. Enter a variable name, under Store Frame in Variable, in which the new frame transform will
be saved, or click Browse to save the to (and overwrite) an existing variable. This is optional,
but necessary if you want to save the computed transform.
5. Click Compute. The control will compute the transformation that defines the new Frame of
Reference and store it in a variable, if you set a variable name in step 4.
Base Points
You must provide three location from which the control will compute the transform for a Frame. These
locations are labeled: Origin, Point on X, Point on Y
• For each location, you must provide the x, y, z coordinates of the new frame expressed by
their position in the World Frame of Reference. The
can facilitate this
process by allowing you to move the robot to these points instead of calculating their value in
World coordinates.
World Frame of Reference
Pallet Frame of Reference