Advanced robot configuration, R details, see, Advanced – Adept DeskTop 4.3 User Manual
Page 137: Robot configuration
Adept DeskTop 4.3 - Online Help
137
Advanced Robot Configuration
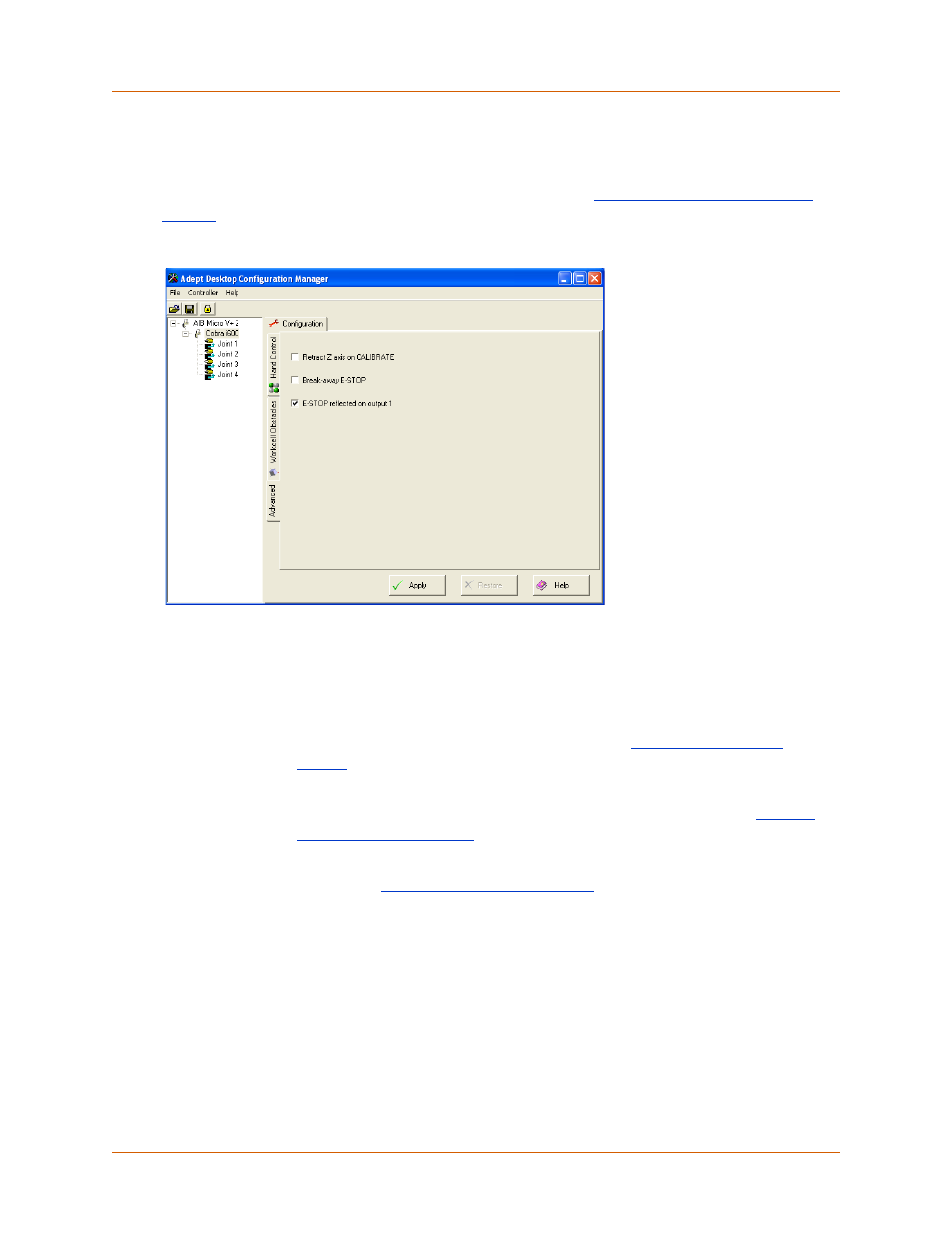
When the robot node is selected in the system tree view, click the Advanced tab to display the
advanced configuration options. This page allows you to select options that control E-STOP and
calibration behavior. For details on selecting the options, see
.
For details on user interface elements see the Field Descriptions below.
Field Descriptions
Tabs
Hand Control
Clicking the Hand Control tab displays the configuration page for hand
control open and close signals. For details, see
.
Workcell
Obstacles
Clicking the Workcell Obstacles tab displays the configuration page to
specify parameters for obstacles in the Workcell. For details, see
Advanced
Clicking the Advanced tab displays the advanced configuration options. For
details, see
.
Option Fields
Retract Z on
CALIBRATE
During calibration of Joint 4, the Z-axis moves slightly. To protect the tool
flange or gripper, select this option to retract the Z-axis before Joint 4
moves during the execution of the CALIBRATE instruction.
Breakaway E-
STOP
The break-away E-stop function is provided to enable a high power
shutdown from the outer link area. For example, if you want a breakaway
gripper to shut down robot high power. It essentially lets you disable high
power via a user relay circuit inside the robot. This feature is set to OFF at
the factory. Check this box to enable the Breakaway E-Stop if required.