Edit joint limits, Joint limits, see – Adept DeskTop 4.3 User Manual
Page 154
Adept DeskTop 4.3 - Online Help
154
Edit Joint Limits
The motion limits for the individual robot joints can be changed from their standard settings to
limit robot joint travel. These software-defined joint limits (soft stops) are intended to protect
the robot joints from colliding with custom workcell hardware. After the robot is calibrated, it is
not possible to exceed the limits under program or pendant control. These limits are often set
just inside of the hardware limit switches. Although MicroV+ should prevent the robot from
moving beyond the soft stops during normal operation, safety considerations require that
hardware limit switches also be used.
On a password-protected robot, the maximum and minimum joint limits can only be changed
after entering the correct password. See
for details.
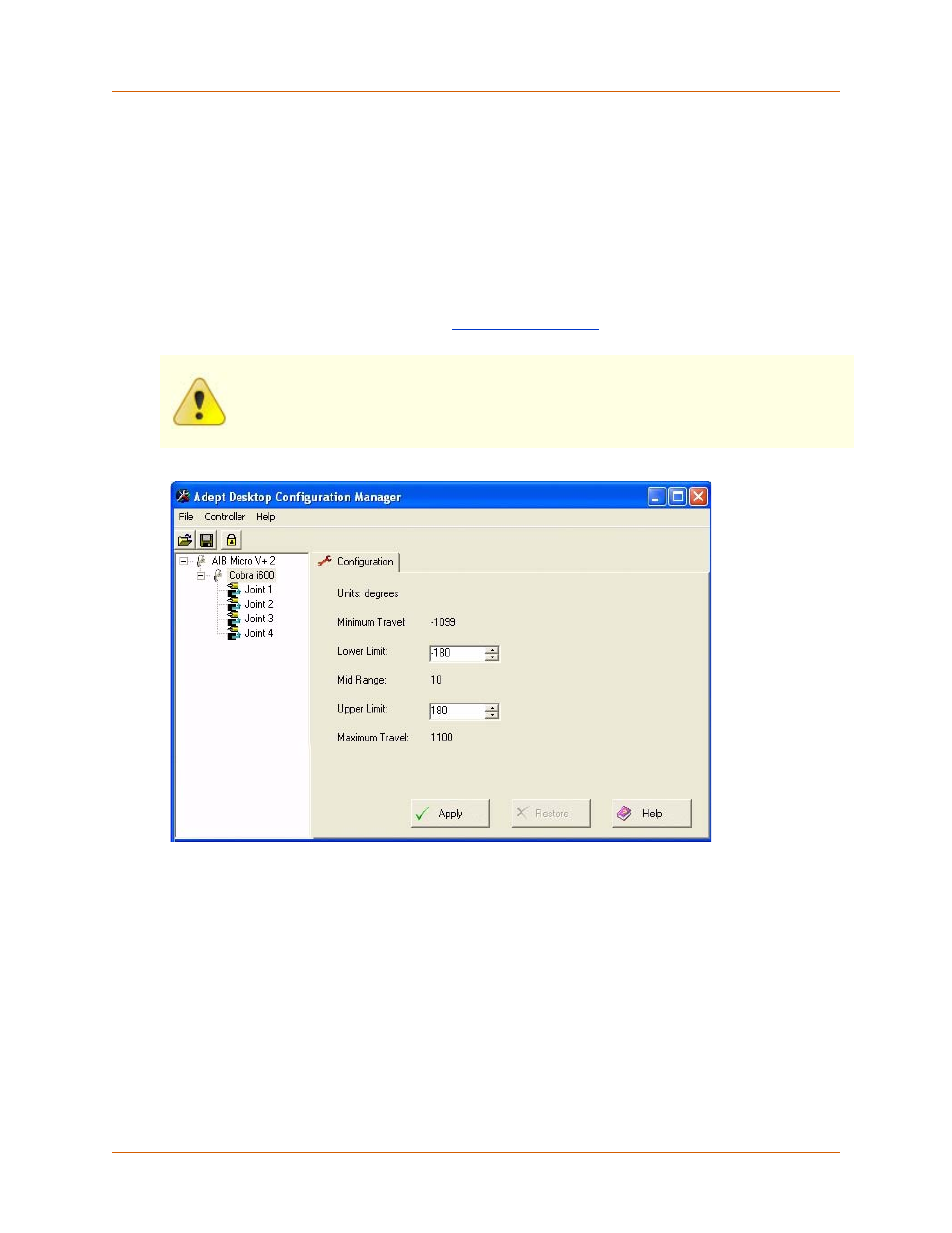
Specify Joint Limits
1. Click the joint to configure in the tree view. The fields on the configuration page will
update to display the current settings for the joints.
2. To change a limit, position the cursor in the field and enter a value, or use the arrow
buttons on the left of the field to adjust the value up or down.
3. After making changes, click Apply to save your changes.
Field Descriptions
Warning:
Be sure to properly set the software joint limits before attempting to
move the robot with a MicroV+ program.
Minimum Travel
Read only.