Adept DeskTop 4.3 User Manual
Page 79
Adept DeskTop 4.3 - Online Help
79
Jog Control
The Jog Control frame provides controls and parameters to physically move the robot and to control
speed and distance of robot movements.
• Use the slider to set a value, or type a value directly in the text box.
• When setting up, slow speed or small increments are recommended.
Movement Commands
Movement command buttons display arrows representing the relative direction in which the robot will
be moved.
For example in
, pressing movement buttons will move the Robot along the Y-axis of the
Robot tool (end-effector) frame of reference.
• The behavior of the movement buttons is determined by the Speed and Increment options.
• The arrow labels vary depending on the selected Mode and Axis. In
, movement
buttons represent robot movement along the Y axis.
• In
, movement buttons represent robot movement as a rotation about the Z axis.
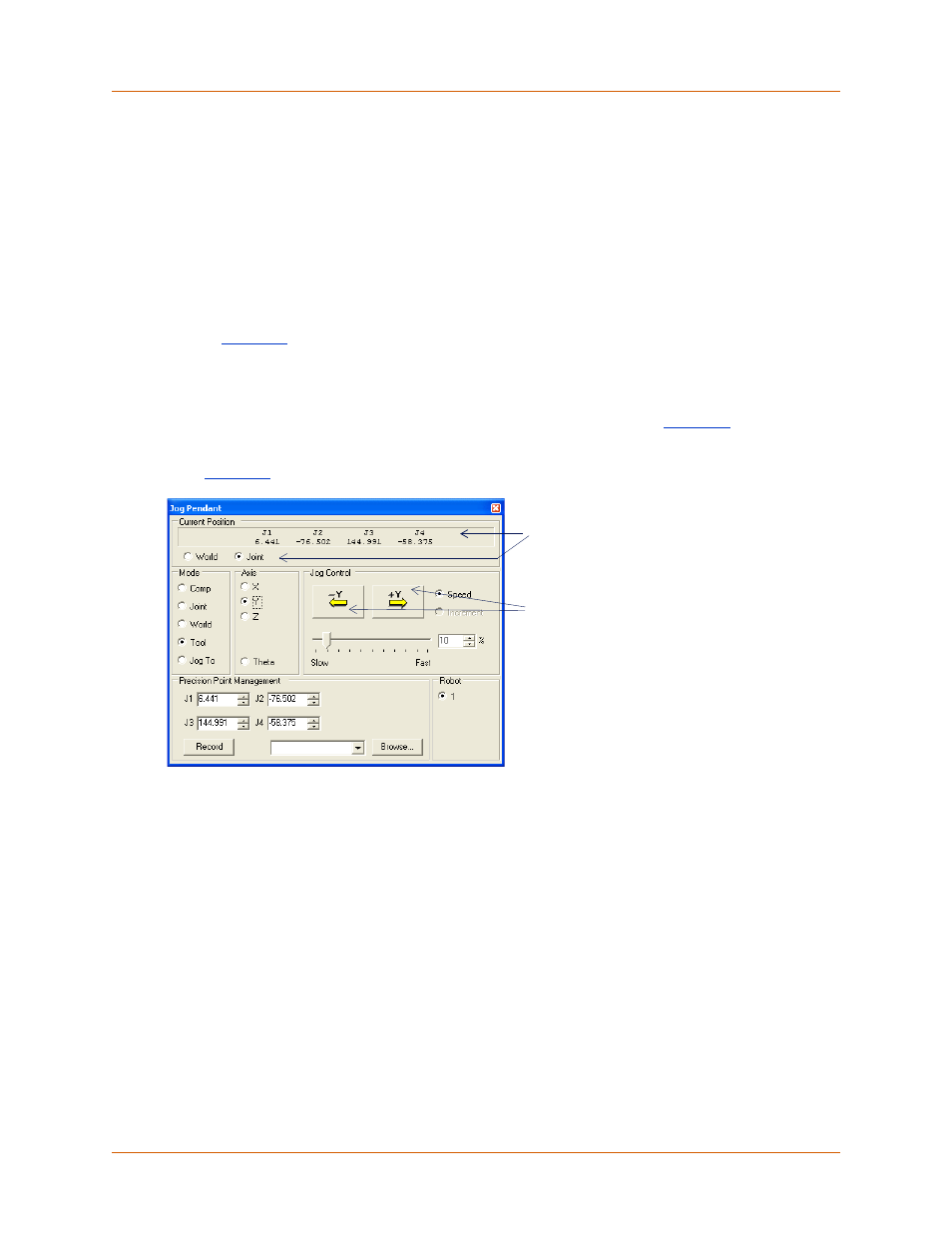
Figure 50 Jog Pendant in Tool Mode
Speed
The Speed option enables you to set the speed at which the robot moves, as a percentage of the
maximum robot speed.
• In this mode, the robot moves with the set speed, in the selected direction, for as long as a
movement button (arrow) is maintained
• When the robot attains its limit (out of range), the movement stops.
• If you need to refine the movement to reach a precise point, the Increment mode may
provide more control.
Increment
The Increment option enables you to set a distance increment for robot movement. This is useful for
precise positioning; for example, when the slowest Speed mode overshoots the precise location to
which you are attempting to position the robot.
Movement buttons express
direction and axis of robot
movement
Robot position expressed
precision-point values when
'Joint' mode is selected