Adept DeskTop 4.3 User Manual
Page 82
Adept DeskTop 4.3 - Online Help
82
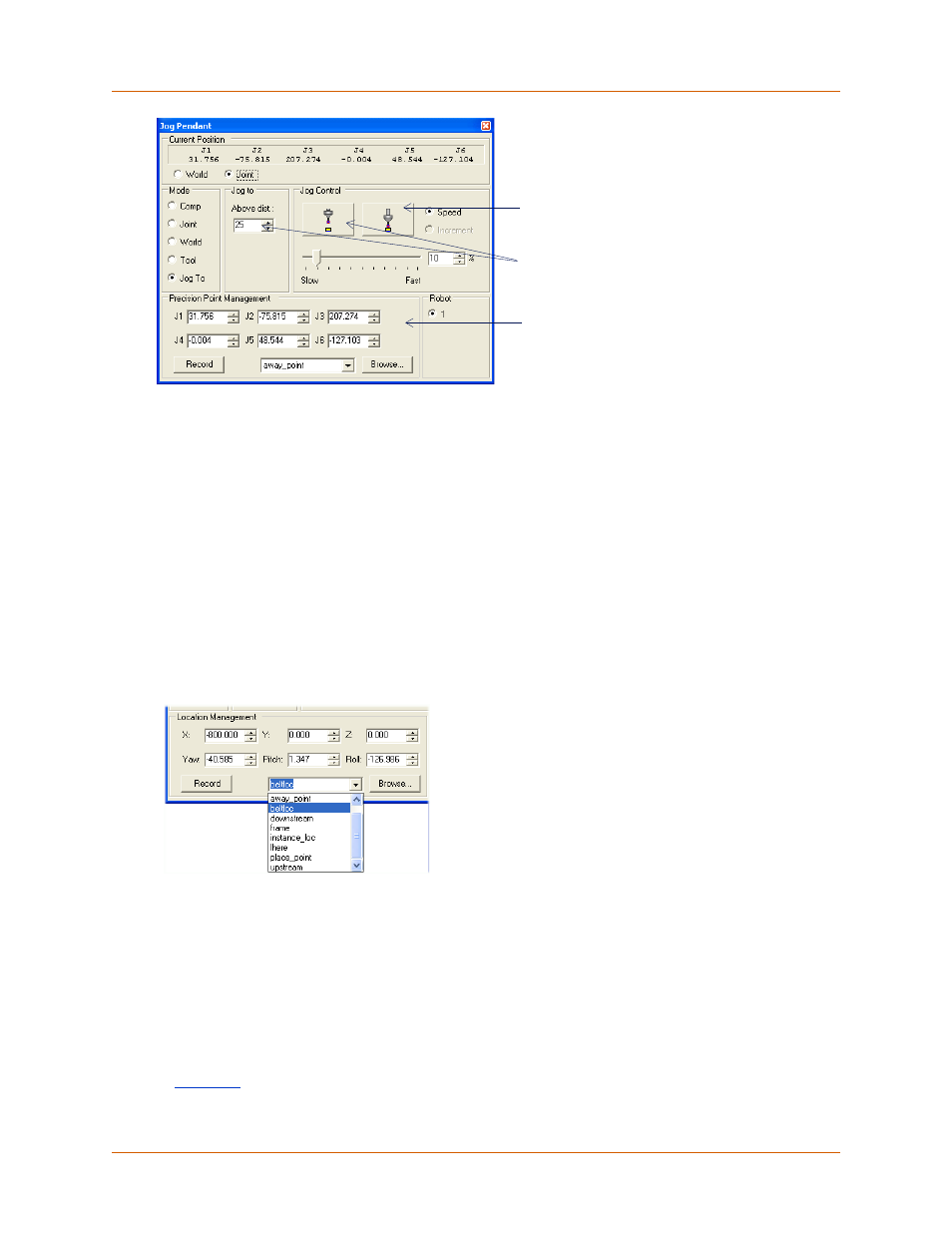
Figure 53 Setting a Robot Location for Jog to Mode
Location Management vs. Precision Point Management
The Location Management frame displays when the robot position is expressed in World
coordinates. A Location must be set in this frame before you enable the Jog To mode.
The Precision Point Management frame displays when the robot position is expressed in Joint
mode.
Location Management
The Location Management frame allows you to either manually set the values of a transform, or get
a transform from the current position of the robot. You can then save this location to variable.
The first three components of a transform variable are the values for the points on the X, Y, and Z axes.
The three other components are the yaw, pitch, and roll.
Figure 54 Selecting a variable in the Location Management Frame
To set a transform from the current robot position:
1. Select the Robot that will provide the transform.
2. Click the Record button. The Location Management values are updated with the values of the
current robot position.
To get a transform from a variable:
1. If you know the name of the required variable, enter or select the name of the variable, as shown
in
.
Moves robot to Jog To location
Moves robot above Jog To location
by distance set by Jog to...dist
Precision Point Management allows
you set precision points or get
points from robot