Vlocation – Adept DeskTop 4.3 User Manual
Page 157
Adept DeskTop 4.3 - Online Help 157
VLOCATION
transformation function
Syntax
MicroV+
VLOCATION
(sequence, tool, instance, result, index, frame)
V+
VLOCATION
(
$ip
, sequence, tool, instance, result, index, frame)
Description
Returns a Cartesian transform result of the execution of the specified vision sequence. The returned
value is a transform result: x, y, z, yaw, pitch, roll.
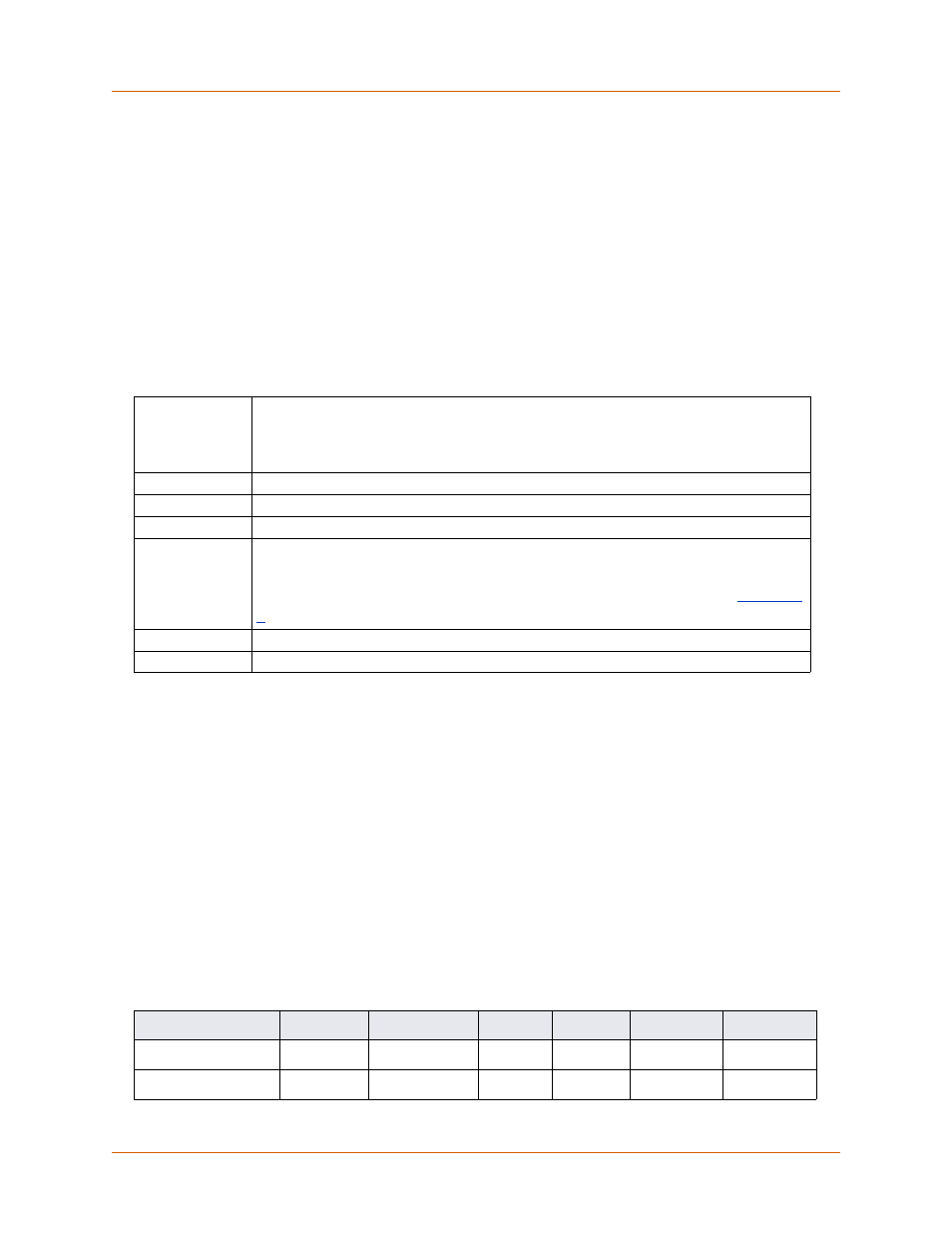
Parameters
Details
Parameters sequence, tool, instance, index, and frame are optional. These parameters are 1-based. If
no value is provided for these parameters, they default to 1.
In V+ the vision server is the PC on which the AdeptSight vision software is running.
To retrieve specific values
• To retrieve global values : sequence = -1, tool = -1
• To retrieve camera values : sequence = -1, tool = cameraIndex
• To retrieve camera-relative-to robot values: sequence = -1, tool = cameraIndex, index =
robotIndex
• To retrieve sequence values: sequence = sequenceIndex, tool = -1
To retrieve Belt Calibration related values (read only)
$ip
IP address of the vision server.
Standard IP address format. For example 255.255.255.255.
This parameter applies to V+ syntax only.
sequence
Index of the vision sequence. 1-based.
tool
Index of the tool in the sequence. 1-based.
instance
Index of the instance for which you want the transform. 1-based.
result
Identifier of the result. Typically this value = 1311.
For gripper offset location this value can be set to 1400 and incremented by 1
for each additional gripper offset. The maximum value is 1499. See
index
Reserved for internal use. Value is always '1'.
frame
Index of the frame that contains the specified instance.
Property
sequence
tool
instance result ID
index
frame
Frame
-1
cameraIndex
n/a
10000
robotIndex
n/a
UpstreamLimit
-1
cameraIndex
n/a 10001
robotIndex
n/a