Jog pendant control – Adept DeskTop 4.3 User Manual
Page 78
Adept DeskTop 4.3 - Online Help
78
Jog Pendant Control
The Jog Pendant control, also called the virtual jog pendant, performs functions similar to the T1
Pendant, from the Adept DeskTop interface. The Jog Pendant Control offers additional features for
increased control and functionality, especially useful for developing, setting up and troubleshooting.
• The robot can be moved in distance increments; this facilitates the moving of the robot to
very precise positions or small increments.
• The Jog To mode allow quick positioning of the robot to defined positions. These positions
can be provided by predefined transformation parameter, stored in a variable, or entered
manually.
To open the Jog Pendant control:
1. From the menu, select View > Jog Pendant
2. Alternatively, from the toolbar, select the Jog Pendant icon.
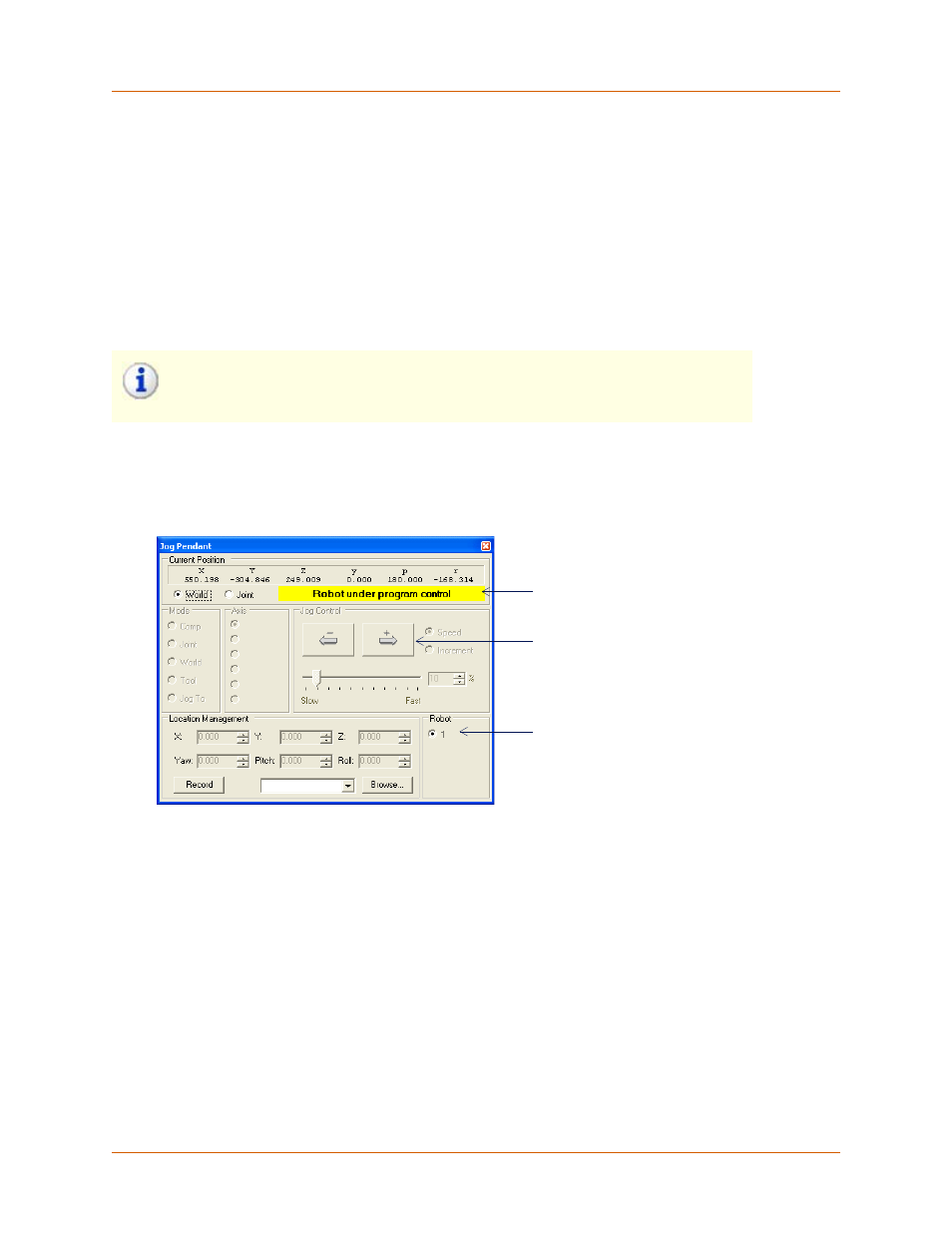
Figure 49 Jog Pendant Tool
Current Position
The Current Position frame displays the current position of the robot tool. This display is dynamically
refreshed as the robot moves.
• Use the World and Joint radio buttons to show the robot position expressed in either
Cartesian units or joint angles.
• In the World frame of reference, position is expressed as x, y, z, yaw, pitch, roll
• In the Joint frame of reference, position is expressed as joint angles, in degrees.
Note:To control the robot from the Jog Pendant Control the physical T1 pendant
MUST be set to Comp mode. If the Pendant is not in comp mode the status
message in the Jog Pendant control window reads: 'Pendant Not In Comp'
Robot Status
message
Movement command
buttons
Robots currently
available