Adept DeskTop 4.3 User Manual
Page 81
Adept DeskTop 4.3 - Online Help
81
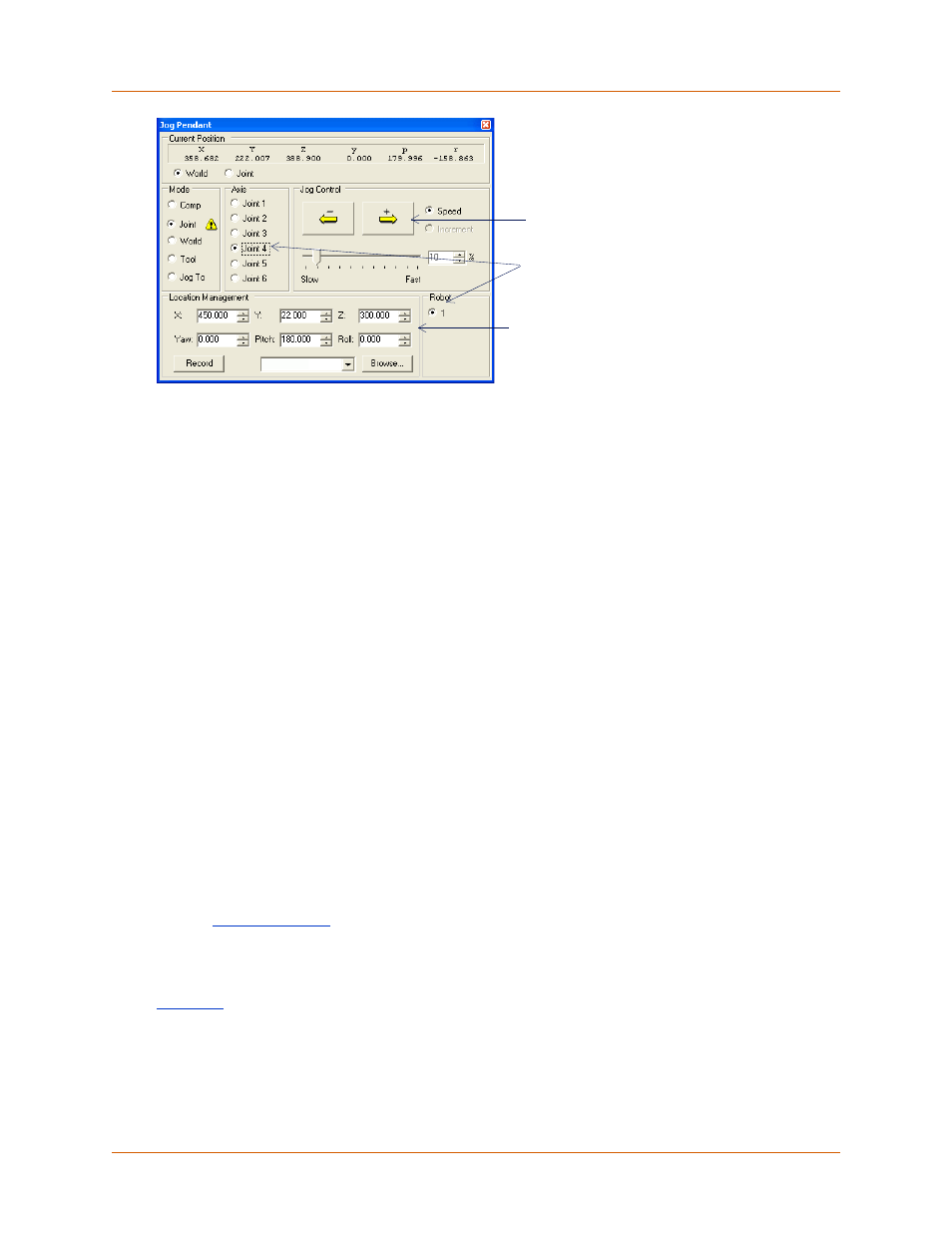
Figure 52 Jog Pendant in Joint Mode
World Mode
World mode enables the Jog Control to move the robot in the selected direction: X, Y, or Z axes, of the
World frame of reference, or rotated around these axes: RX, RY, or RZ, in the world coordinate system.
Tool Mode
Tool mode enables the Jog Control to move the robot in the selected direction X, Y, or Z axes of the
Tool coordinate system, or rotated around these axes: RX, RY, or RZ, in the tool coordinate system.
Jog To Mode
The Jog To mode allows you to move the robot to a defined location. You must first set the Jog To
location before you enable the Jog To button.
• The Jog To location is defined under Location Management if the current robot position is
expressed in World coordinates.
• Jog To locations can only be expressed in Cartesian units.
• Jog To mode is not available in MicroV+ systems.
To set the Jog To location:
1. Set the Jog To location by doing one of the following:
• Enter or select known values in the required fields
• Acquire the location from a variable: click Browse and select a location array variable from
the
.
• Click Record to set the Jog To location.
2. Set a distance value under Jog to - distance. This enables the Jog Control buttons shown in
to move to the robot either directly to the Jog To position, or above the Jog To
position, at the defined distance.
Buttons move selected
joint in + or - direction
Number of joints depends
on the type of the
selected robot
Location Management allows
you set location manually or
get location from robot