Metrohm 789 Robotic Sample Processor XL User Manual
Page 112
3.8 Dosing and liquid handling
104
Metrohm Sample Processor, Operation
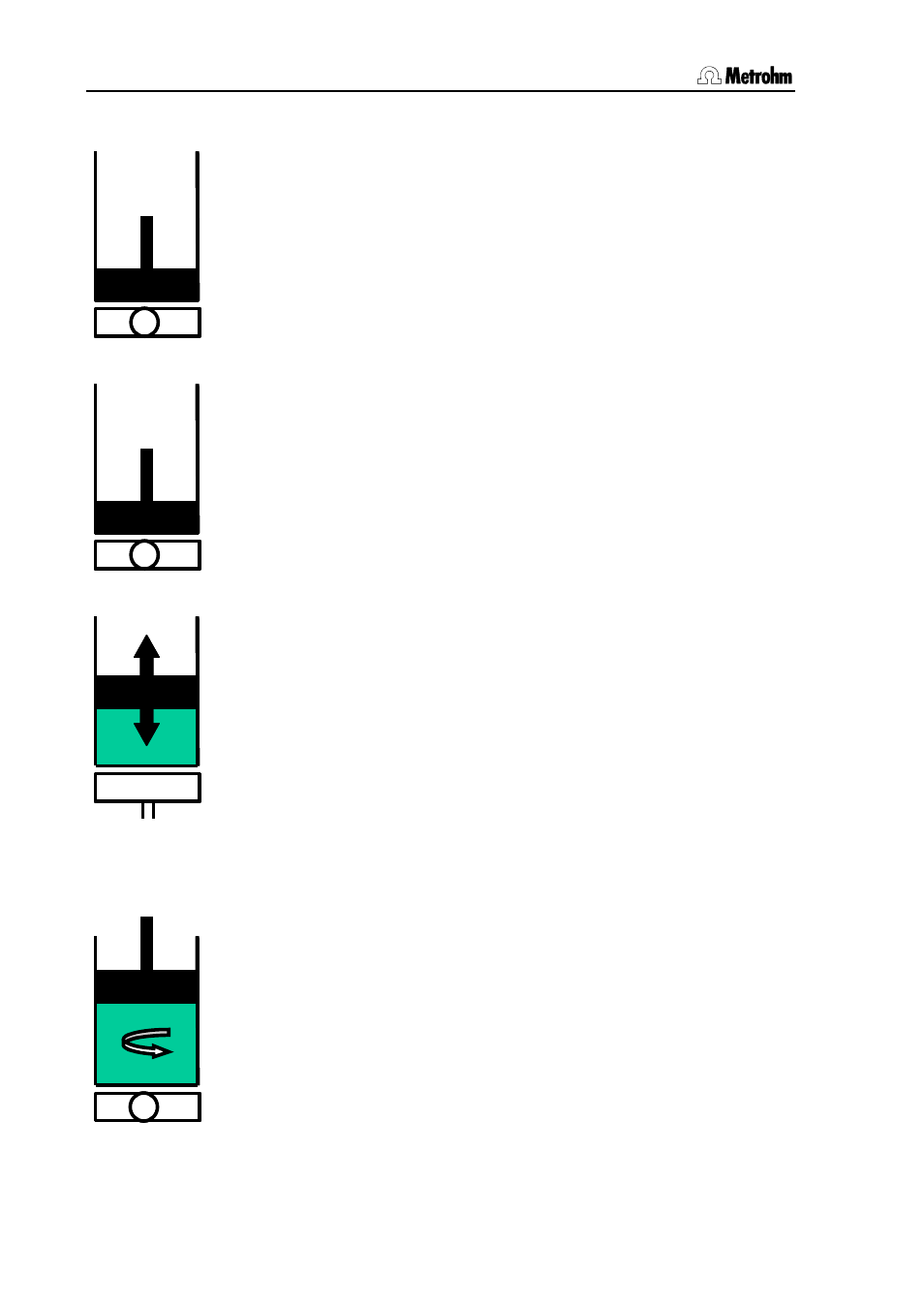
Ejecting
11
Example:
DOS: 1.1 : eject mL
Default port = 1
The whole cylinder contents are ejected via the given port. The piston
is lowered beyond the max. volume mark to the stop.
This command should be used for removing air bubbles.
Run piston to end volume
11
Example:
DOS: 1.1 : endVol mL
Default port = 1
The cylinder content is ejected via the given port. The piston is run to
the max. volume mark.
This command should be used for the pipetting functions.
Compensating the mechanical play
44
Example:
DOS: 1.4 : compen. mL
Default port = 1
As the Dosing units are exchangeable, the coupling of the Dosino
connecting rod (spindle) has a slight degree of mechanical tolerance
which is noticeable when the direction of the piston movement
changes. This tolerance can be compensated. This is done by first
making a short piston movement in the same direction as the previous
piston movement, followed by an equivalent piston movement in the
opposite direction.
Stopcock rotation
33
Example:
DOS: 1.3 : port mL
Default port = 1
The stopcock rotates to the given port. No piston movement takes
place. The direction of rotation is determined by the parameter
stop-
cock direction
under
>Dosing unit def.
in the parameter menu.