Square root – Rockwell Automation 20B PowerFlex 70, PowerFlex 700 Reference Manual User Manual
Page 26
Analog Inputs
26
Rockwell Automation Publication PFLEX-RM001H-EN-P - June 2013
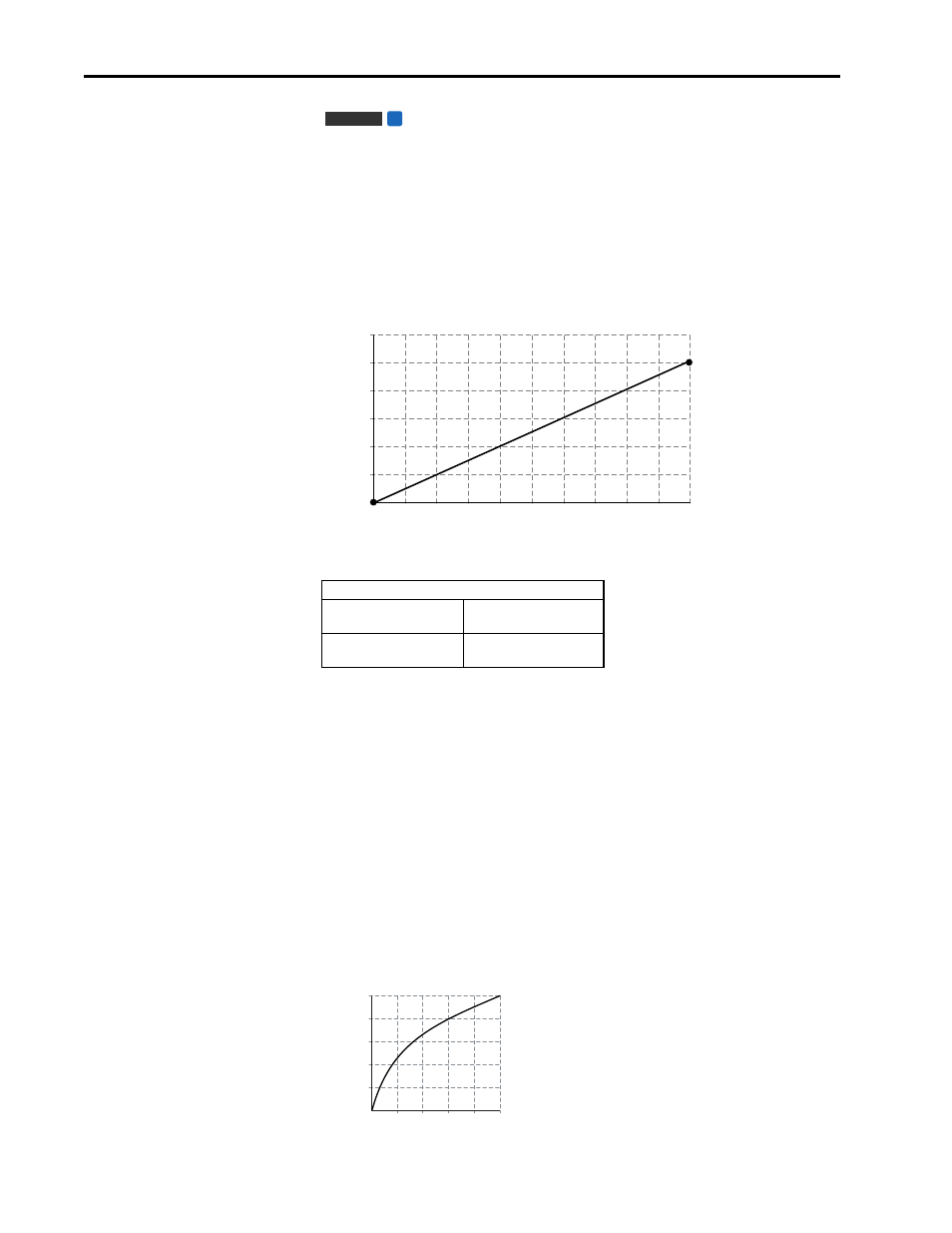
Configuration #6 – Torque Ref:
•
[Anlg In Config], bit 0 = “0” (Voltage)
•
[Torque Ref A Sel] = “Analog In 1”
•
[Torque Ref A Hi] = 200%
•
[Torque Ref A Lo] = 0%
•
[Torque Ref A Div] = 1
This configuration is used when the input signal is 0-10 volts. The minimum
input of 0 volts represents a torque reference of 0% and maximum input of 10
volts represents a torque reference of 200%.
Square Root
[Anlg In Sqr Root]
For both analog inputs, the user can enable a square root function for an analog
input through the use of [Analog In Sq Root]. The function should be set to
enabled if the input signal varies with the square of the quantity (i.e. drive speed)
being monitored.
If the mode of the input is bipolar voltage (–10v to 10v), then the square root
function will return 0 for all negative voltages.
The square root function is scaled such that the input range is the same as the
output range. For example, if the input is set up as a unipolar voltage input, then
the input and output ranges of the square root function will be 0 to 10 volts, as
shown in figure below.
Analog Scaling
[Torque Ref A Sel] = “Analog In 1”
[Analog In 1 Hi]
10V
[Torque Ref A Hi]
200%
[Analog In 1 Lo]
0V
[Torque Ref A Lo]
0%
Vector
FV
2
4
6
8
10
12
20
0
40
60
Torque Ref %
Input Volts
80
100
120
140
160
180
200
2
4
6
8
10
2
0
4
6
Input (Volts)
Output (Volts)
8
10