Torque reference, Torque reference input – Rockwell Automation 20B PowerFlex 70, PowerFlex 700 Reference Manual User Manual
Page 204
Torque Reference
204
Rockwell Automation Publication PFLEX-RM001H-EN-P - June 2013
Figure 59 Flux Vector
Torque Reference
When the PowerFlex 700 Vector Control drive is operated in
Torque mode, an external signal is used for a Torque reference. Refer to
.
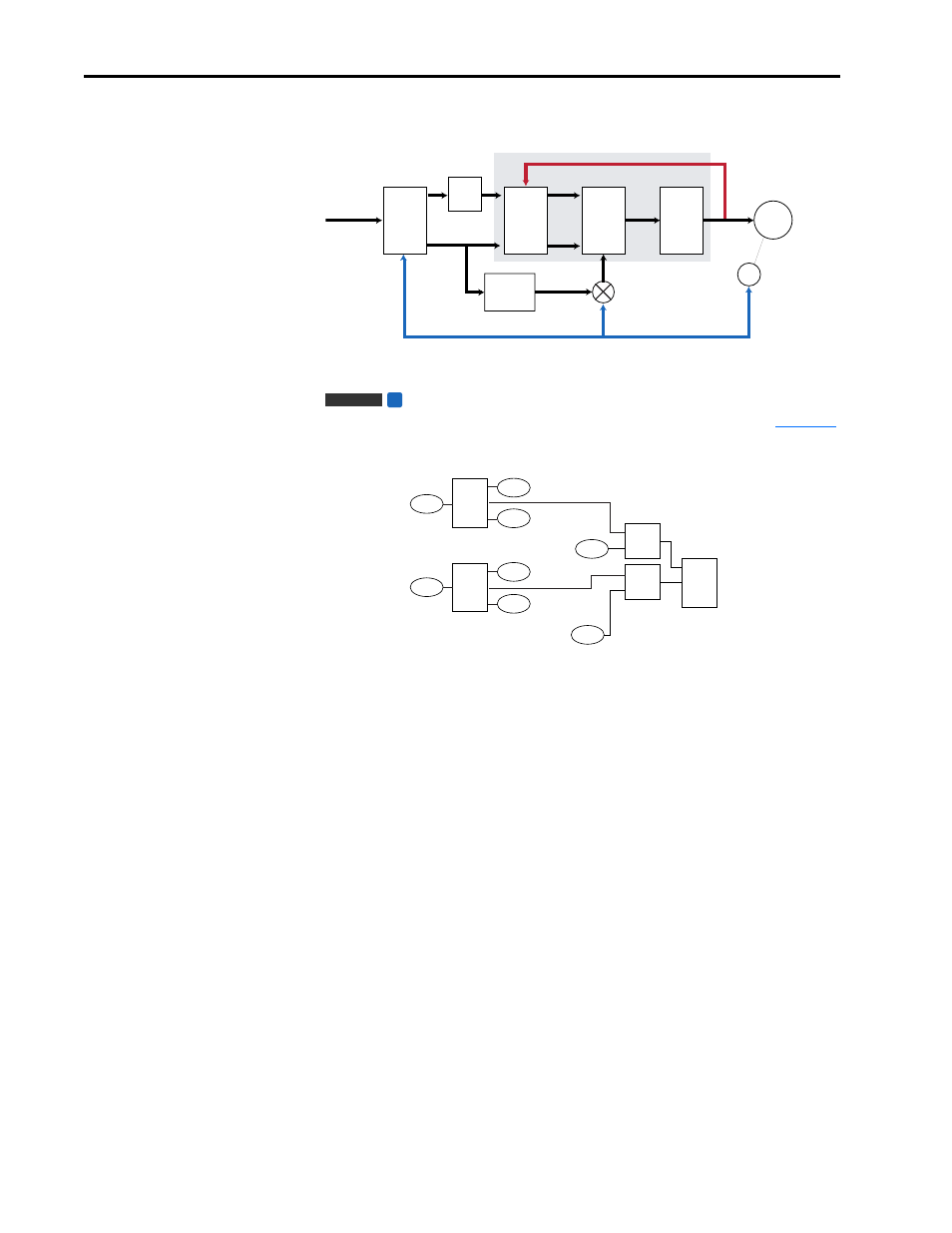
Figure 60
Torque Reference Input
[Torque Ref A], parameter 427 is used to supply an external reference for how
much torque is desired. The scaling of this parameter is from –800 to +800, via
[Torq Ref A Hi] and [Torq Ref A Lo].
Torque Ref 1 is then divided by [Torq Ref A Div], parameter 430. This defines
the scaled Torque Ref A.
[Torque Ref B], parameter 431 is used to supply an external reference for how
much torque is desired. The scaling of this parameter is from –800 to +800, via
[Torq Ref B Hi] and [Torq Ref B Lo].
The Torque Ref B is then multiplied by [Torq Ref B Mul], parameter 434. This
defines the scaled Torque Ref B.
Once the scaling is complete on both Torque Ref A and Torque Ref B, the output
is summed to create the external torque reference
This can be utilized when a master/slave multi-drive system is configured. The
torque reference into the “slave” can be scaled to create the proper torque output.
Keep in mind that the motors may be different ratings and this function is used
to help the “system” share the load.
Adaptive
Controller
High Bandwidth Current Regulator
SPEED REF.
TORQUE REF.
SLIP
SPEED FEEDBACK
CURRENT FEEDBACK
AUTOTUNE PARAMETERS
V mag
V ang
Current
Reg.
Speed
Reg.
Flux
Reg.
Voltage
Control
Inverter
Motor
Encoder
Vector
FV
431
Scale
Scale
433
432
429
428
434
430
/
x
+
Ref A Hi
Ref A Lo
Ref B Hi
Torq Ref A Div
Torq Ref B Mult
Ref B Lo
Torque Ref B Sel
427
Torque Ref A Sel