Flux vector control – Rockwell Automation 20B PowerFlex 70, PowerFlex 700 Reference Manual User Manual
Page 203
Torque Performance Modes
Rockwell Automation Publication PFLEX-RM001H-EN-P - June 2013
203
The algorithms operate on the knowledge that motor current is the vector sum of
the torque and flux producing components. Values can be entered to identify the
motor values or an autotune routine can be run to interrogate and identify the
motor values (see
). Early versions required feedback, but
today, performance is sensorless. It offers high breakaway torque, exceptional
running torque, a wider speed range than V/Hz, higher dynamic response and a
fast accel “feed forward” selectable for low inertia loads (adaptive current limit).
Sensorless vector is not a torque regulating technology. It does NOT
independently control the flux and torque producing currents. Therefore, it
cannot be used to regulate torque (torque follower).
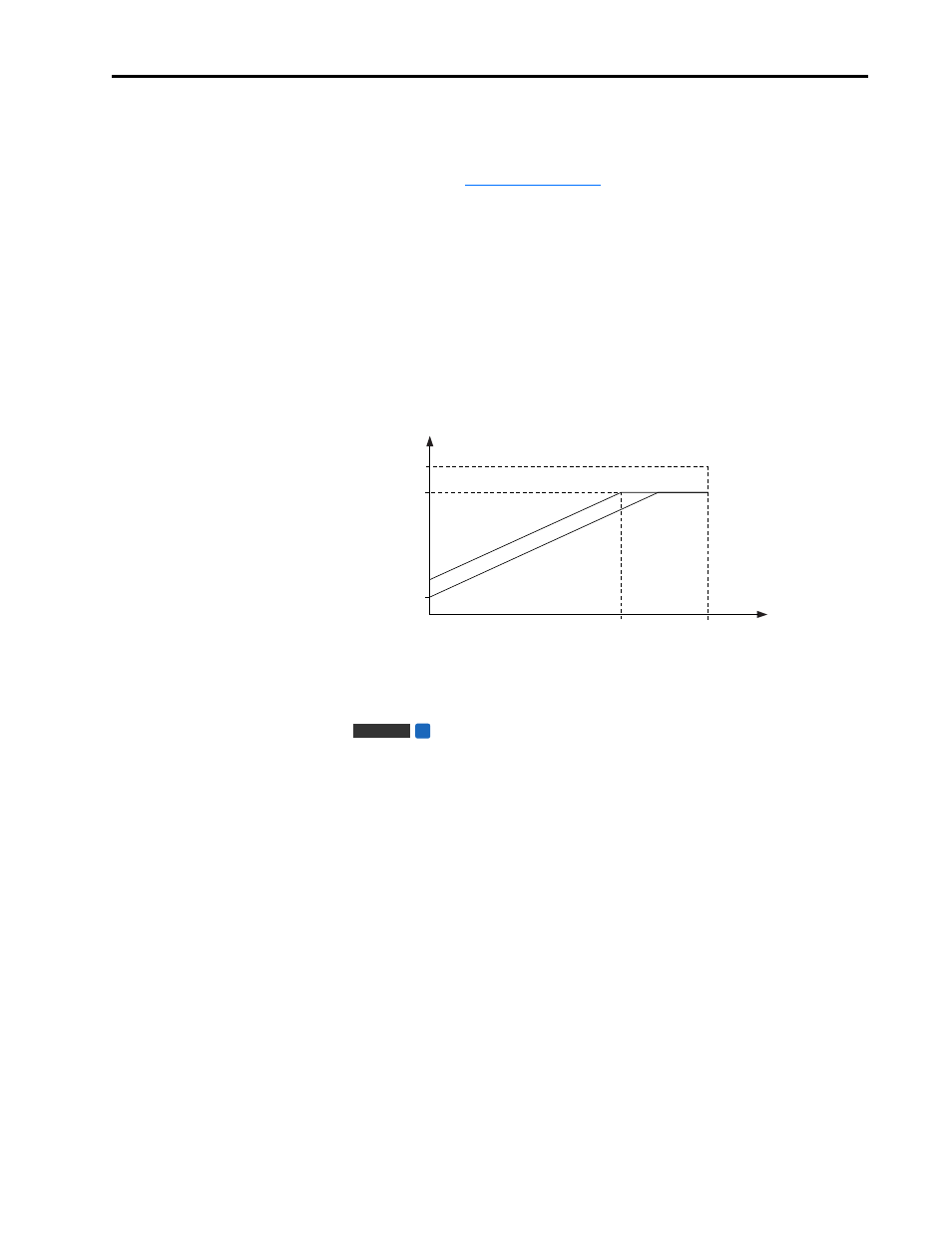
In sensorless vector control, the drive maintains a constant flux current up to base
speed, allowing the balance of the drive available current to develop maximum
motor torque. By manipulating output voltage as a function of load, excellent
motor torque can be generated.
Flux Vector Control
The drive takes the speed reference that is specified by the Speed Reference
Selection Block and compares it to the speed feedback. The speed regulator uses
Proportional and Integral gains to adjust the torque reference for the motor. This
torque reference attempts to operate the motor at the specified speed. The torque
reference is then converted to the torque producing component of the motor
current. This type of speed regulator produces a high bandwidth response to
speed command and load changes.
In flux vector control, the flux and torque producing currents are independently
controlled. Therefore, we can send a torque reference directly instead of a speed
reference. The independent flux control also allows us to reduce the flux in order
to run above base motor speed.
Apppro
xim
ate F
ull Lo
ad C
urv
e
Apppro
xim
ate No Lo
ad C
urv
e
Maximum Voltage
Maximum
Frequency
Base Voltage
(Nameplate)
Base Frequency
(Nameplate)
Ir Voltage
Vector
FV