Speed/torque select, Feed forward gain, Speed desired bw – Rockwell Automation 20B PowerFlex 70, PowerFlex 700 Reference Manual User Manual
Page 172: Total inertia
Speed/Torque Select
172
Rockwell Automation Publication PFLEX-RM001H-EN-P - June 2013
value of zero. Units are (per unit torque) / (per unit speed). For example, when
[Kp Speed Loop] is 20, the proportional gain block will output 20% motor rated
torque for every 1% error of motor rated speed.
Feed Forward Gain
The first section of the PI regulator is the feed forward block. [Kf Speed Loop]
allows the speed regulator to be dampened during speed changes. To reduce
speed overshoot, reduce the value of [Kf Speed Loop]. During auto-tune, the
feed forward is left open (no dampening).
Speed Desired BW
[Speed Desired BW] sets the speed loop bandwidth and determines the dynamic
behavior of the speed loop. As bandwidth increases, the speed loop becomes
more responsive and can track a faster changing speed reference. Adjusting this
parameter will cause the drive to calculate and change [Ki Speed Loop] and [Kp
Speed Loop] gains.
Total Inertia
[Total Inertia] represents the time in seconds, for a motor coupled to a load to
accelerate from zero to base speed, at rated motor torque. The drive calculates
Total Inertia during the autotune inertia procedure. Adjusting this parameter will
cause the drive to calculate and change [Ki Speed Loop] and [Kp Speed Loop]
gains.
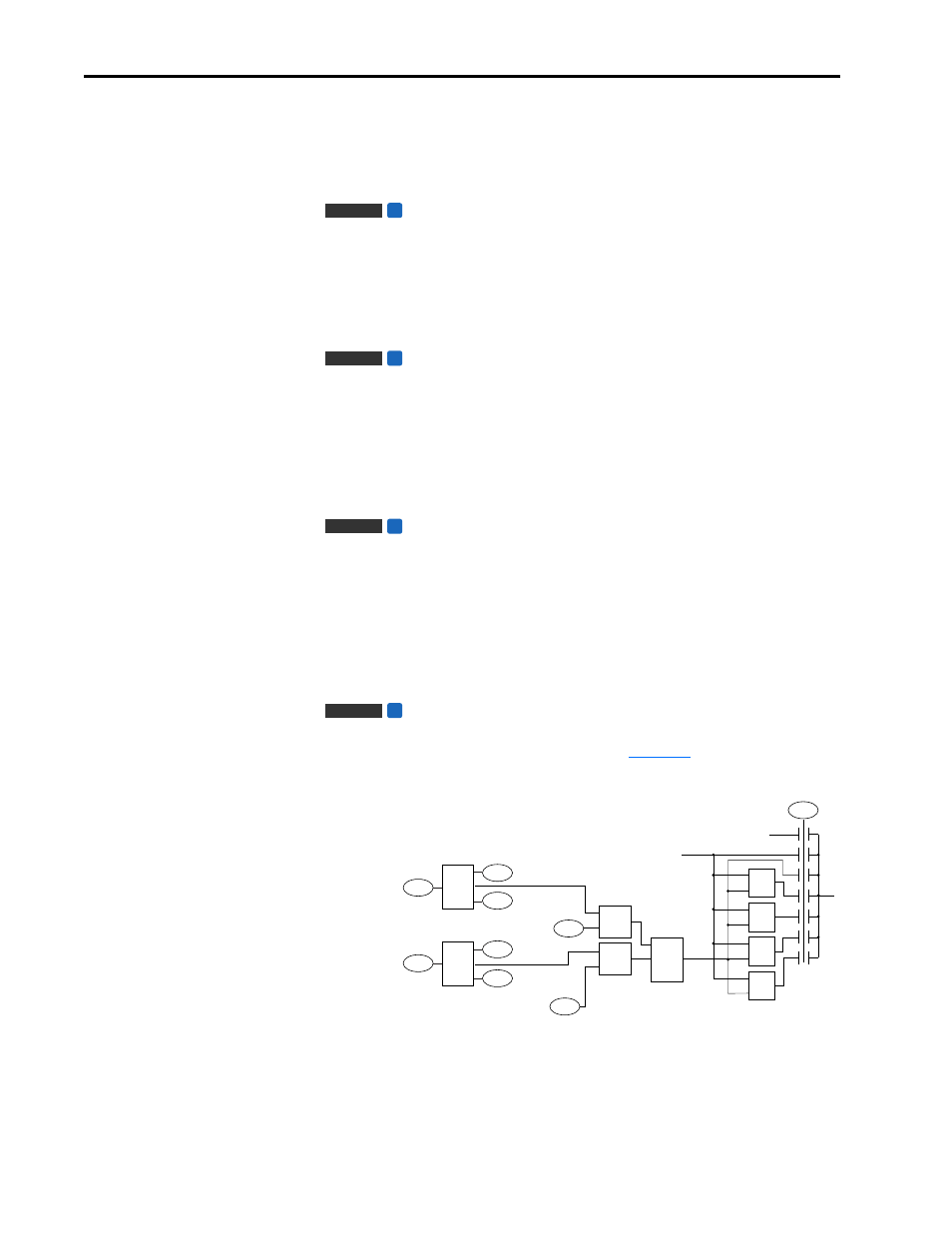
Speed/Torque Select
[Speed/Torque Mod] is used to choose the operating mode for the
drive. The drive can be programmed to operate as a velocity regulator, a torque
regulator, or a combination of the two. Refer to
Figure 37
Vector
FV
Vector
FV
Vector
FV
Vector
FV
431
Scale
Scale
433
432
429
428
434
430
0
0
1
2
3
4
5
6
/
x
+
Ref A Hi
Ref A Lo
Ref B Hi
Torq Ref A Div
Speed/Torque Mod
Spd Reg PI Out
Torq Ref B Mult
Ref B Lo
Torque Ref B Sel
427
Torque Ref A Sel
88
Min
Max
+
abs
Min