Project and programming checklist – Rockwell Automation 1756-RMxx ControlLogix Enhanced Redundancy System User Manual User Manual
Page 281
Rockwell Automation Publication 1756-UM535D-EN-P - November 2012
281
Enhanced Redundancy System Checklists
Appendix F
Project and Programming Checklist
In addition to the checklist below, see the
ControlLogix Controller Checklist
on
.
EtherNet/IP HMI
HMI Blind Time is the time during a switchover from primary to secondary, when tag data from the controller is unavailable for reading or writing. See
Reduction on Ethernet During a Switchover on page 21
IMPORTANT: This feature requires RSLinx Enterprise software, version 5.50.04 or later.
• PanelView Standard terminal
None (the use of the PanelView Standard terminal in a redundant system requires the same considerations as a nonredundant system).
• PanelView Plus terminal, VersaView industrial computer running a Windows CE operating system
RSLinx Enterprise software, version 3.0 or later, is used.
Within each of the controllers and communication modules, five connections for each PanelView Plus or VersaView terminal are reserved.
• FactoryTalk View SE software with RSLinx Enterprise software
RSLinx Enterprise software, version 3.0 or later is used.
IP address swapping is used.
HMI and both redundant chassis are on the same subnet.
• FactoryTalk View SE software with RSLinx software, version 2.x, RSView® 32 software, Any other HMI client software that uses RSLinx software, version 2.x
The number of RSLinx servers that a controller uses is limited to 1…4 (maximum).
(1) Other IP address configurations are permitted, but require additional considerations. For more information, see
Use IP Address Swapping on page 77.
Requirement
Requirement
The Redundancy Module Date and Time has been set by using the RMCT.
One project is created by using RSLogix 5000 software and is downloaded to the primary controller.
(1)
Redundancy is enabled within the Redundancy tab of the Controller Properties dialog box.
Task configuration is either:
• One continuous task within the project.
or
• Multiple periodic tasks with only one task at the highest priority. Also, multiple tasks are structured so that the fewest possible separate tasks are used.
The redundant controller program does not contain:
• Event tasks.
• Inhibited tasks.
Programming specific to critical I/O that must be bumpless is placed in the highest-priority user task according to your task configuration.
For 1756-L6x controllers, the task watchdog is (2 * maximum_scan_time) + 150 ms when using ControlNet I/O and (2* maximum_scan_time) + 100 ms when using
Ethernet I/O, where maximum_scan_time is the maximum scan time for the entire task to complete when the redundant controllers are synchronized.
To calculate watchdog time for 1756-L7x controllers, see
Minimum Value for the Watchdog Time on page 177
.
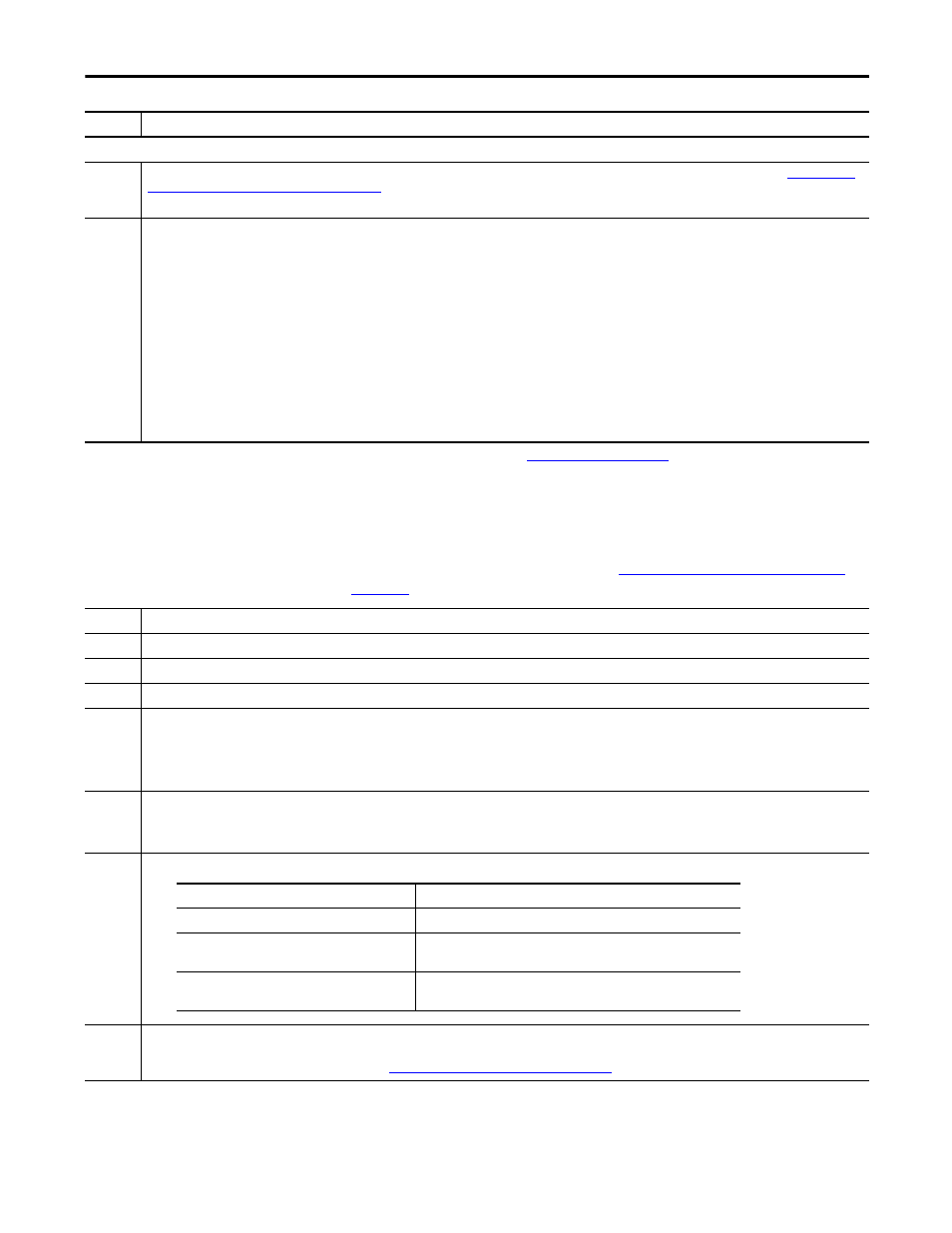
If you use this task structure
Then programming specific to bumpless I/O is in
One continuous task
The continuous task.
One continuous task and one or more periodic tasks
The highest-priority periodic task where only that one task is at the
highest priority.
Multiple periodic tasks
The highest-priority periodic task where only that one task is at the
highest priority.