Multiple periodic tasks – Rockwell Automation 1756-RMxx ControlLogix Enhanced Redundancy System User Manual User Manual
Page 147
Rockwell Automation Publication 1756-UM535D-EN-P - November 2012
147
Program the Redundant Controller
Chapter 7
Multiple Periodic Tasks
In a project where multiple periodic tasks are used, the point where program
execution begins after a switchover depends on the following:
• Crossload and synchronization settings
• Task priority settings
As with the continuous task, the controller begins executing at the program that
follows the last crossload and synchronization point.
In addition, a higher priority task may interrupt a lower priority task. If a
switchover occurs during or just after the higher priority task executes and the
lower priority task has not been completed, then the lower priority task and
programs are executed from the point at which the last crossload occurred.
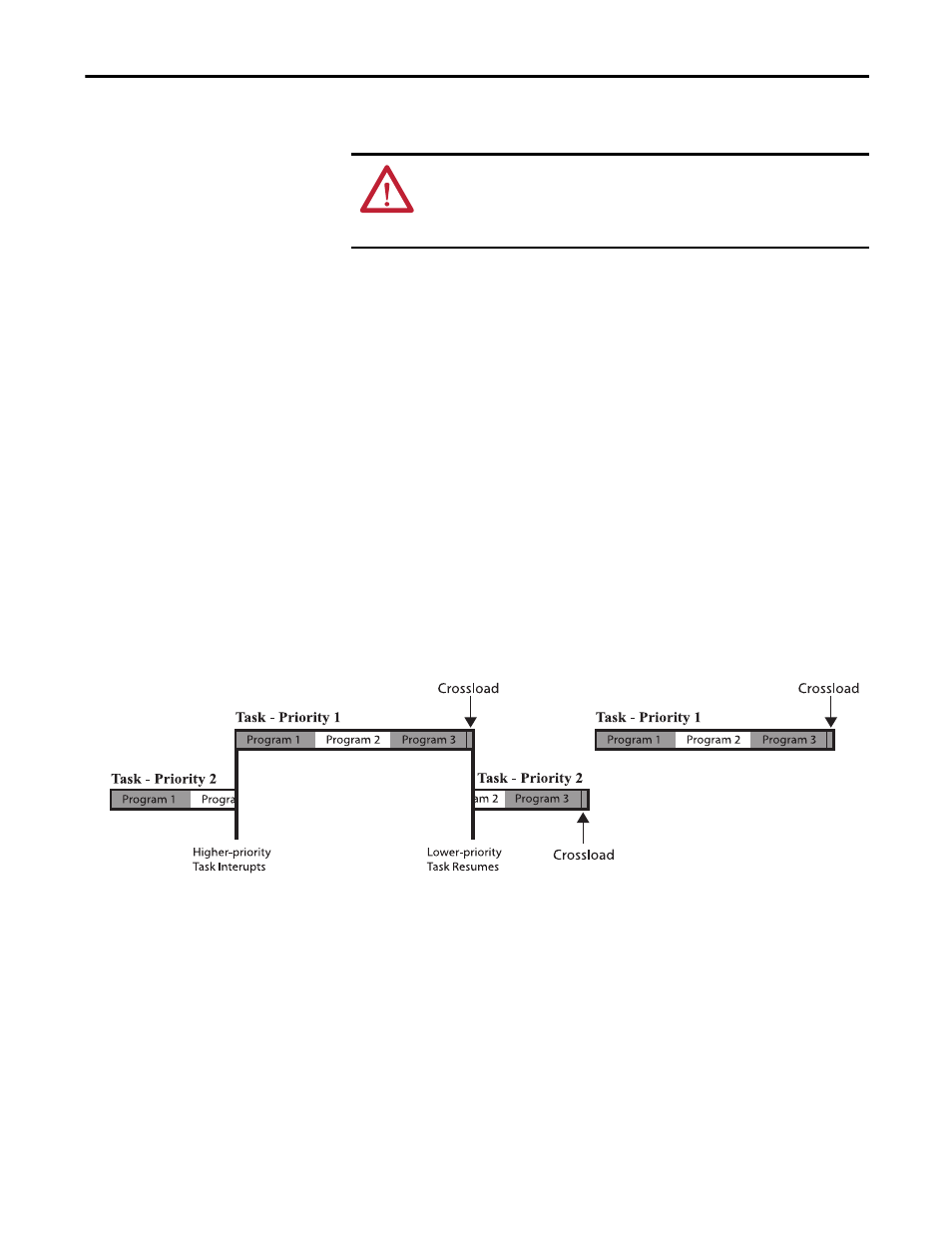
This diagram demonstrates how tasks at different priorities execute if a
switchover occurs while a lower priority task is executing. Note that the crossload
and synchronization points in this example are set to occur only at the end of the
last program within the tasks and not at each program’s end.
Figure 35 - Normal Periodic Task Execution (no switchover)
ATTENTION: If you use multiple periodic tasks, program all crucial
outputs within the highest-priority task. Failure to program outputs in
the highest-priority task can result in outputs changing state if a
switchover occurs.