Buffering critical data, Scan-dependent logic – Rockwell Automation 1756-RMxx ControlLogix Enhanced Redundancy System User Manual User Manual
Page 160
160
Rockwell Automation Publication 1756-UM535D-EN-P - November 2012
Chapter 7
Program the Redundant Controller
Buffering Critical Data
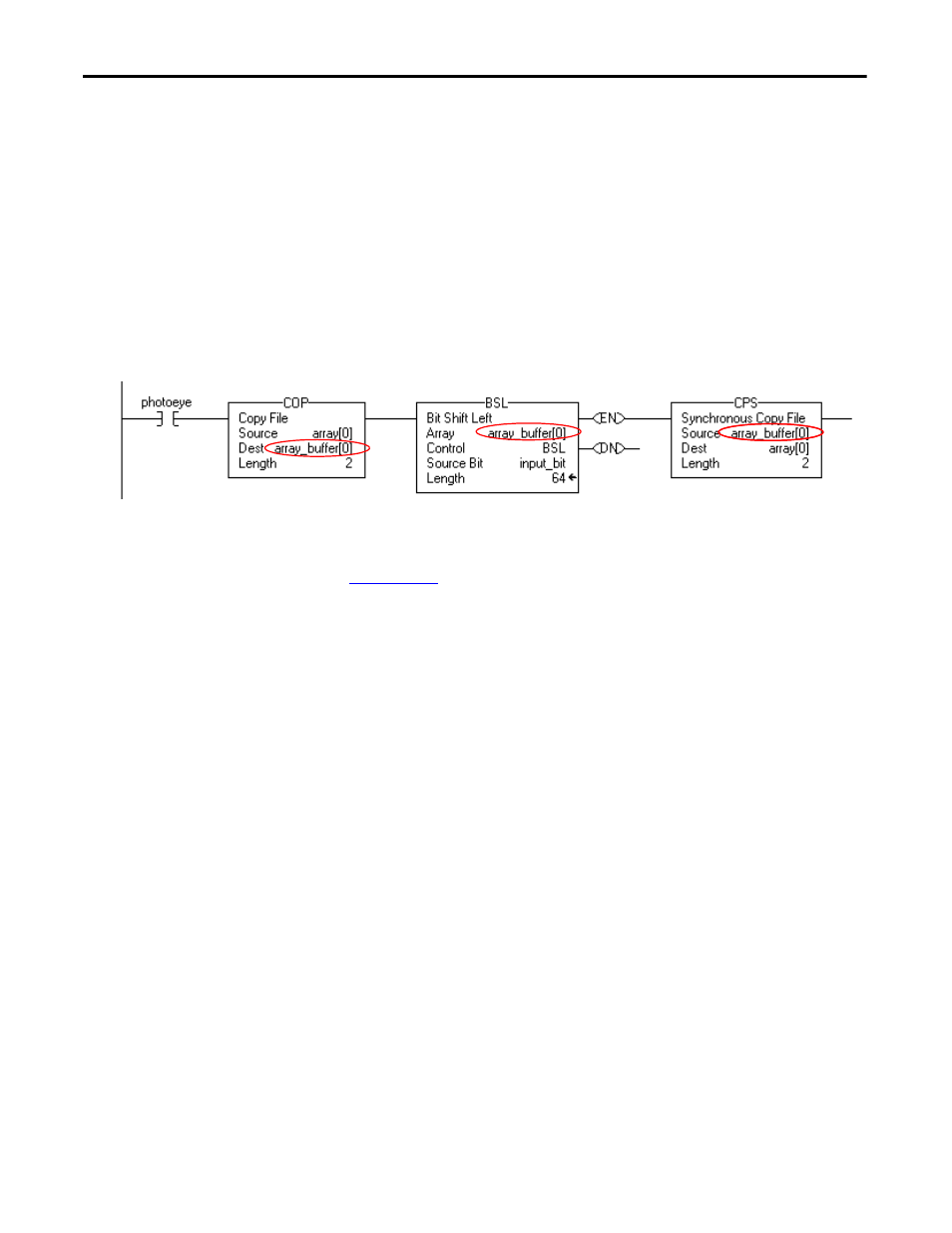
If you cannot place Array (File)/Shift instructions in the highest-priority task,
consider using a buffer with Copy File (COP) and Synchronous Copy File (CPS)
instructions to maintain the integrity of the array of data.
The programming example shown here shows the use of a COP instruction to
move data into a buffer array. The BSL instruction uses the data in that buffer
array. The CPS instruction updates the array tag and maintains data integrity
because it cannot be interrupted by a higher priority task. If a switchover occurs,
the source data (that is, the array tag) remains unaffected.
Figure 46 - Using a Buffer to Maintain Data During Shift
For more information about BSL, BSR, FFU, COP, and CPS instructions see the
Logix5000 Controllers General Instructions Reference Manual, publication
.
Scan-dependent Logic
If you program a lower priority task so that one instruction is dependent on
another instruction that occurs elsewhere in your program, your programming
may be disrupted by a task interrupt and switchover. The disruption can occur
because the lower priority task may be interrupted by the higher priority task and
then a switchover may occur before the lower priority task is completed.
When the lower priority task is executed from the beginning by the new primary
controller after the switchover, the dependent instruction may not execute at the
most recent value or state.