IAI America PCON-PO User Manual
Page 48
36
4. Operation Using I/O Signals
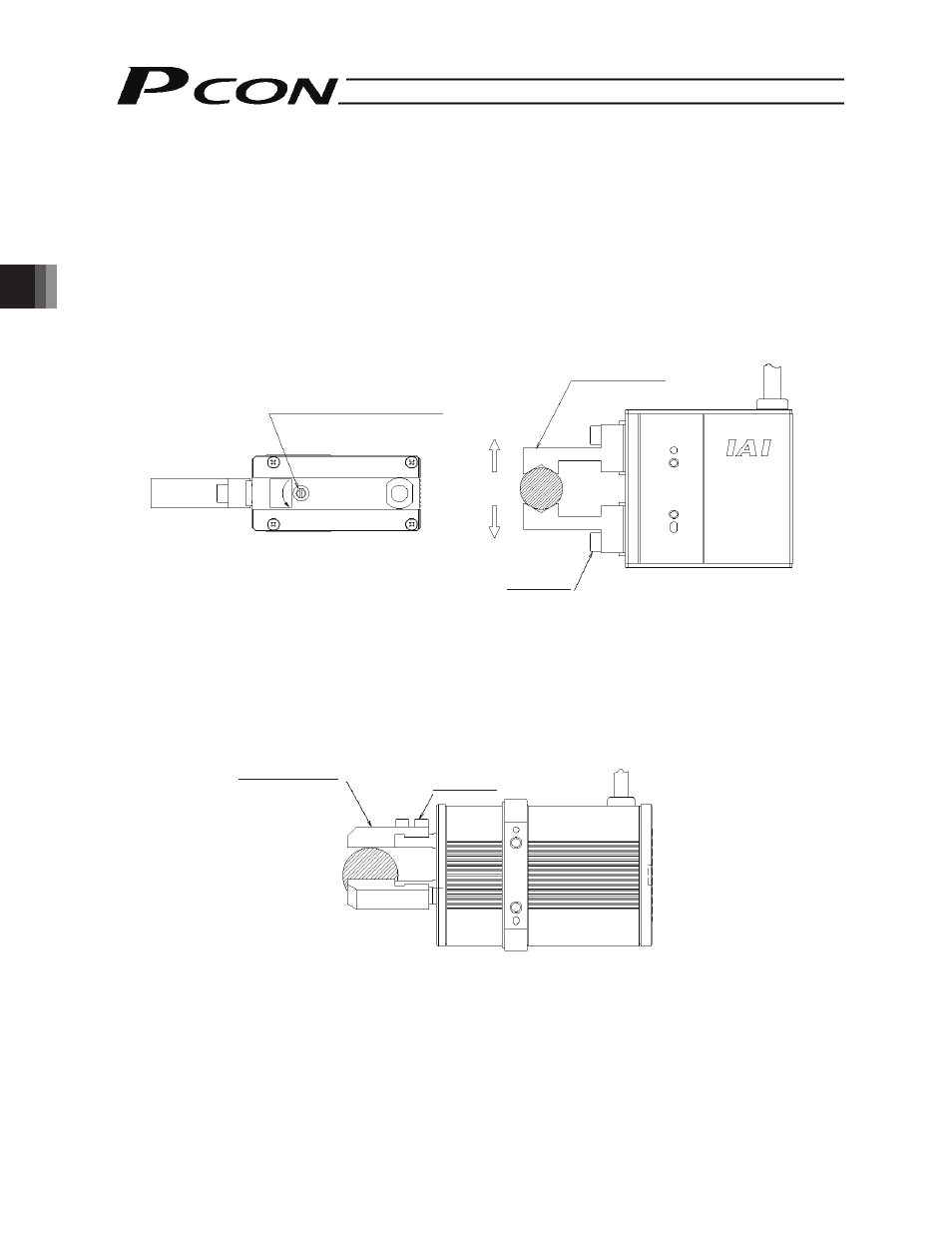
(2) Removing
the
gripped
work
The ROBO Gripper is structured in such a way that even when the controller power is cut off, the work gripping force
will still be maintained by a self-lock mechanism.
If you must remove the gripped work while the power is cut off, turn the open/close screw or remove one of the finger
attachments to release the work.
[Two-finger type]
Turn the open/close screw or remove one of the finger attachments.
[Three-finger type]
Remove one of the finger attachments.
OPEN
Open/close screw
Turn counterclockwise using
a flat-head screwdriver.
Finger attachment
Opening
direction
Affixing bolt
Finger attachment
Affixing bolt
This manual is related to the following products: