Parameter record, 112 * appendix – IAI America PCON-PO User Manual
Page 124
112
* Appendix
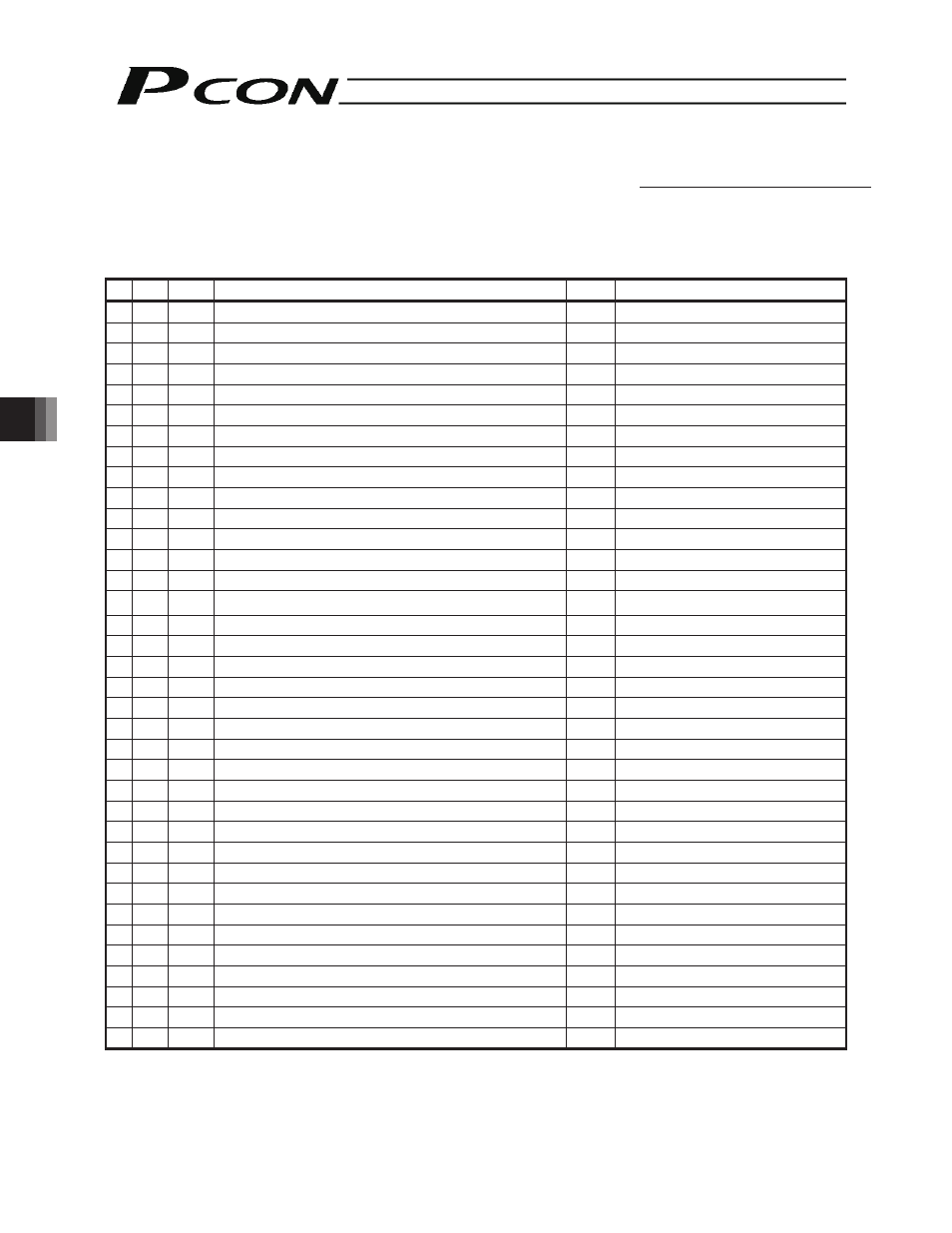
Parameter Record
Recorded date:
Types: a: Parameter relating to actuator stroke range
b: Parameter relating to actuator operating characteristics
c: Parameter relating to external interface
d: Servo gain adjustment
No.
Type
Symbol Name
Unit
Factory
default
3
a
LIMM
Soft limit + side
mm
4
a
LIML
Soft limit – side
mm
5
a
ORG
Home direction [0: Reverse / 1: Forward]
-
7
d
PLGO Servo gain number
-
9 b ACMD
Default
acceleration/deceleration
G
10
b
INP
Default positioning band (in-position)
mm
12 b SPOW Current-limiting value at standstill after positioning
%
13
b
ODPW Current-limiting value during homing
%
16
c
BRSL SIO communication speed
bps
17 c RTIM
Minimum delay time for slave transmitter activation
msec
18 B LS
Power sensor input polarity
-
21 c SOM
Servo-on input [0: Enable / 1: Disable]
22 a OFST
Home
offset
mm
25 c IOPN
PIO
pattern
selection
-
28 b PHSP
Default direction of excited phase signal detection [0: Reverse / 1:
Forward]
29
b
PHSP Excited phase signal detection time
msec
31
d
VLPG Speed loop proportional gain
-
32
d
VLPT
Speed loop integral gain
-
33
d
TRQF Torque filter time constant
-
35 b SAFV
Safety
speed
mm/sec
40
b
HOME Enable function [0: Enable / 1: Disable]
-
42
b
ENBL Home check sensor input polarity
-
43
c
HMC
Silent interval multiplication factor
-
45 b SIVM
Speed override
-
53 b HSTP
Default
standstill
mode
-
57 b TQLM
Torque
limit
%
58
c
SDCR Clear deviation at servo off/alarm stop [0: Disable / 1: Enable]
-
59
b
FSTP
Monitor error while limiting torque [0: Disable / 1: Enable]
-
60
c
DCLR Deviation-counter clear input [0: Enable / 1: Disable]
-
61
c
TL
Torque-limit command input [0: Enable / 1: Disable]
-
62
b
CPR
Pulse count direction [0: Forward / 1: Reverse]
-
63
c
MOD
Command-pulse input mode
-
64
c
POLE Polarity in command-pulse input mode [0: Positive / 1: Negative]
-
65 b CNUM
Electronic
gear
numerator
-
66 b CDEN
Electronic
gear
denominator
-
77
B
LRAD Ball screw lead length
mm