I component, Characteristics – Burkert Type 8635 User Manual
Page 147
8635 - 145
G
ENERAL
R
ULES
(A
PPENDIX
)
1
Ti
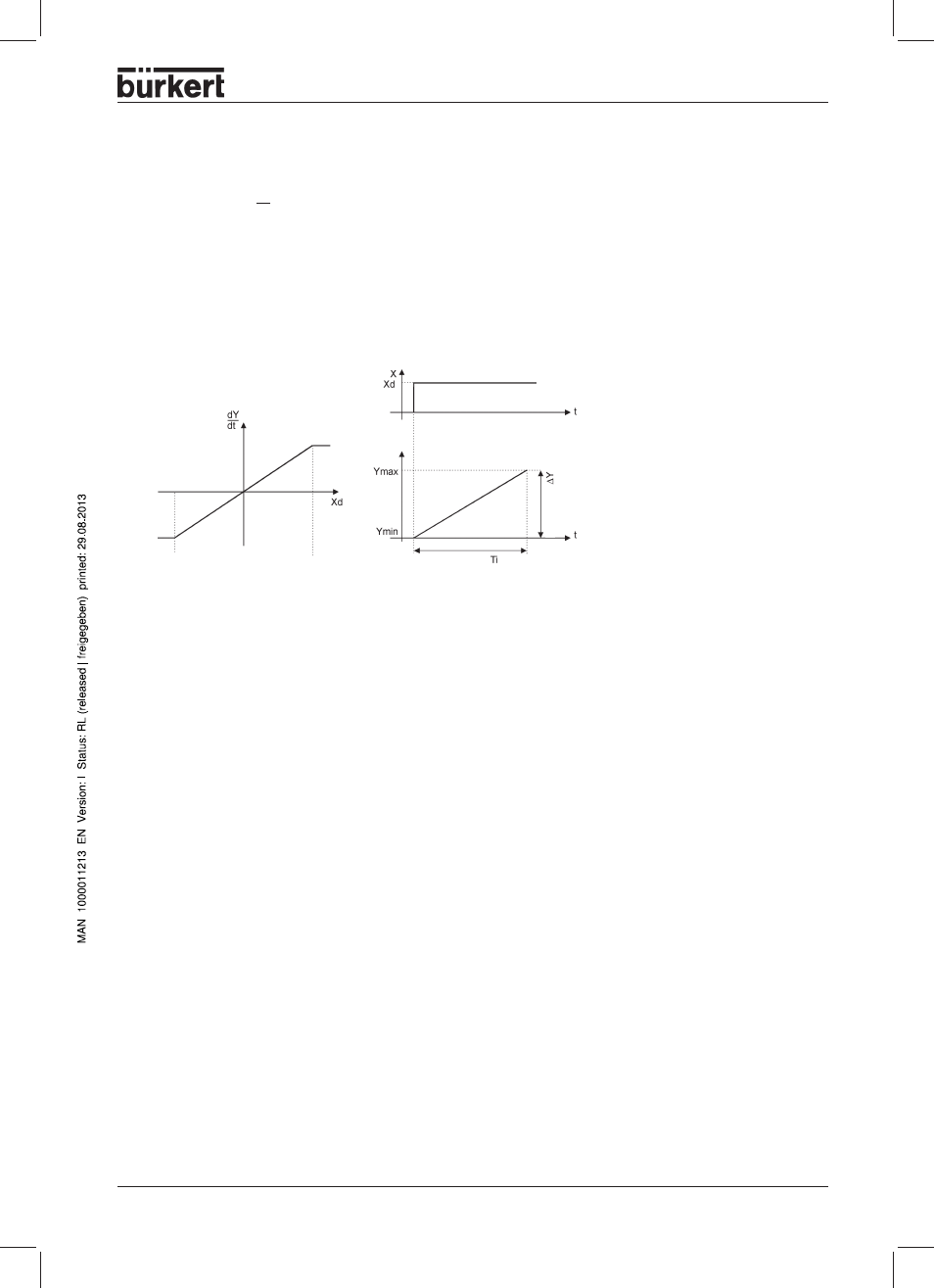
I component
Function: Y =
∫ Xd dt
Ti is the integration or floating time. It is the time that expires until the controller output has run through
the entire correcting range.
Characteristic and step resonse of the I component of a PID controller
Characteristic
Step response
Control range
∆Xc
Characteristics:
A purely I controller completely eliminates the effects of disturbances. It thus has a favourable static
behaviour. Because of its finite correcting speed, it works more slowly than a P controller and tends to
oscillation. It is hence dynamically relatively unfavourable.
Floating time
Control r
a
n
g
e
See also other documents in the category Burkert Accessories for water:
- Type 0125 (15 pages)
- Type 0121 (4 pages)
- Type 6012 (4 pages)
- Type 0330 (2 pages)
- Type 0331 (4 pages)
- Type 0127 (18 pages)
- Type 0131 (5 pages)
- Type 0141 (5 pages)
- Type 0142 (12 pages)
- Type 0145 (3 pages)
- Type 0174 (5 pages)
- Type 0212 (2 pages)
- Type 0211 (5 pages)
- Type 0212-B (18 pages)
- Type 0250 (64 pages)
- Type 0253 (2 pages)
- Type 0255 (15 pages)
- Type 0355 (2 pages)
- Type 0255 (2 pages)
- Type 8640 (2 pages)
- Type 8640 (55 pages)
- Type 8640 (119 pages)
- Type 8006 (34 pages)
- Type 0256 (15 pages)
- Type 0256 (2 pages)
- Type 0258 (72 pages)
- Type 0262 (5 pages)
- Type 0273 (6 pages)
- Type 0280 (12 pages)
- Type 0280 (5 pages)
- Type 0280 (2 pages)
- Type 0281 (2 pages)
- Type 0282 (2 pages)
- Type 0283 (2 pages)
- Type 0286 (4 pages)
- Type 0287 (15 pages)
- Type 0290 (2 pages)
- Type 0290 (14 pages)
- Type 0293 (18 pages)
- Type 0300 (6 pages)
- Type 0301 (6 pages)
- Type 0312 (6 pages)
- Type 0311 (2 pages)
- Type 6519 (3 pages)
- Type 6519 (4 pages)