Overview, Speed reference selection, Enabling the position loop – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 88
88
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
Chapter 1
Detail Drive Configuration and Operation
•
When using an encoder for positioning, the drive uses quadrature
counts, i.e., 1024 encoder = 4096 counts per motor revolution.
•
When using a Stegmann absolute hi-resolution encoder, the drive
counts 1048576 counts per revolution.
•
When using a Resolver, the drive counts 65536 counts per revolution.
•
Speed regulator tuning directly affects the position loop performance. The
speed regulator should be tuned before the position loop.
•
For best performance, positioning should be used with a dynamic brake or
regenerative system.
Overview
The Point to Point positioning feature gives the user the ability to position the
load without an external position controller. The Point to Point function of the
position loop moves from current location to commanded location then holds
that position until given a new reference or a stop command. The position loop
can be scaled to different units other than feedback counts, degrees or inches.
Typical applications for the Point to Point function would be turn-tables and
storage retrieval machines.
Speed Reference Selection
The speed reference should be set to zero speed when using point to point
positioning. For example, set parameter 16 [Speed Ref Sel] = 0 “Zero Speed”.
Enabling the Position Loop
To enable the position loop, set parameter 151 [Logic Command] bit 13
“PositionEnbl” = 1.
Then to allow the output of the position loop to trim the speed set parameter 740
[Position Control] bit 1 “Speed Out En” = 1.
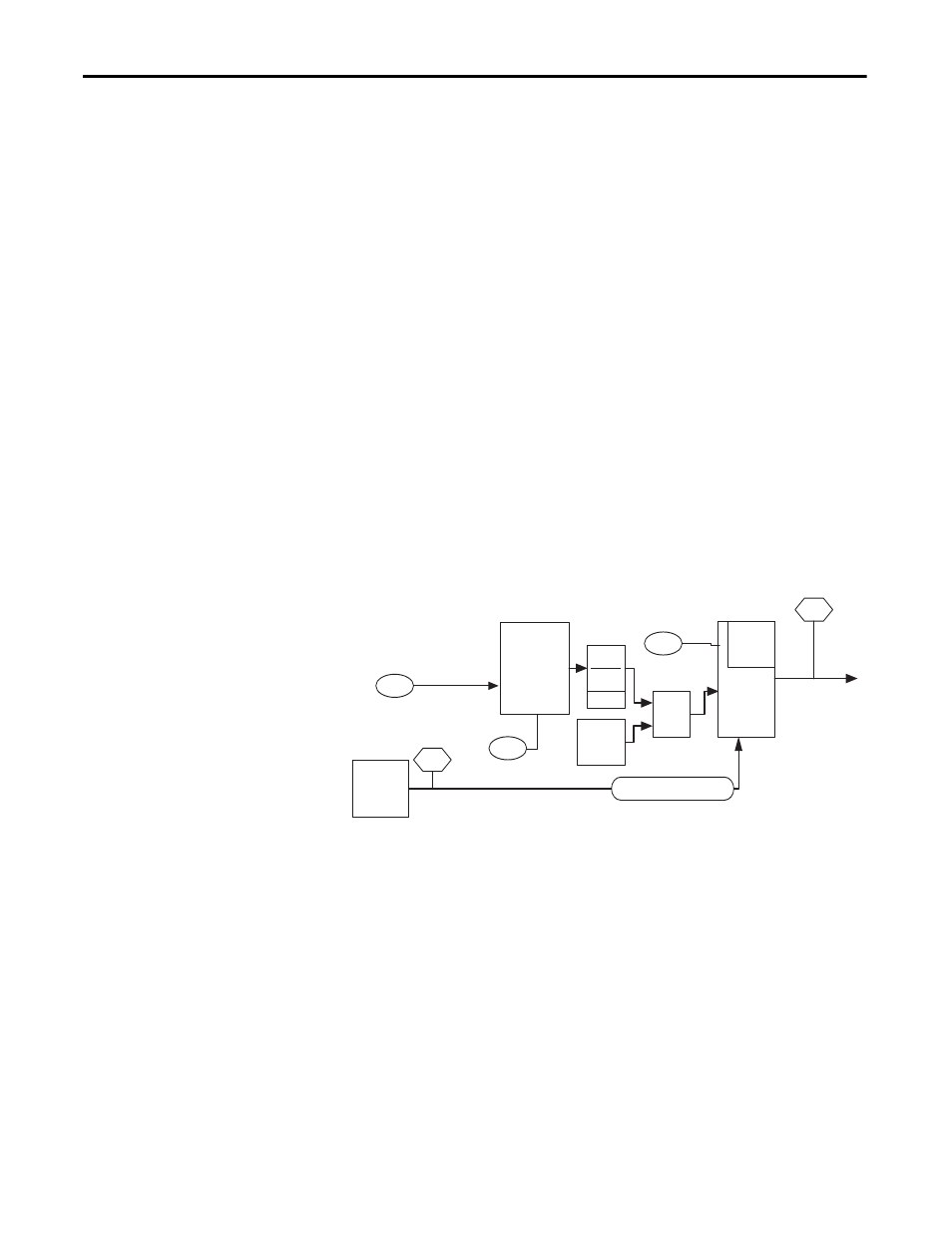
Reference
Selection
(Mode)
758
Pt-Pt Posit Ref
742
Posit Ref Sel
Gear Rat
[ N ]
[ D ]
+
Position
Offset
PI
Regulator
Point to
Point
768
PositReg P Gain
762
Position Fdbk
318
Position
Feedback
Selection
Proportional Channel