Speed reference scaling – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 131
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
131
Detail Drive Configuration and Operation
Chapter 1
Speed Reference Scaling
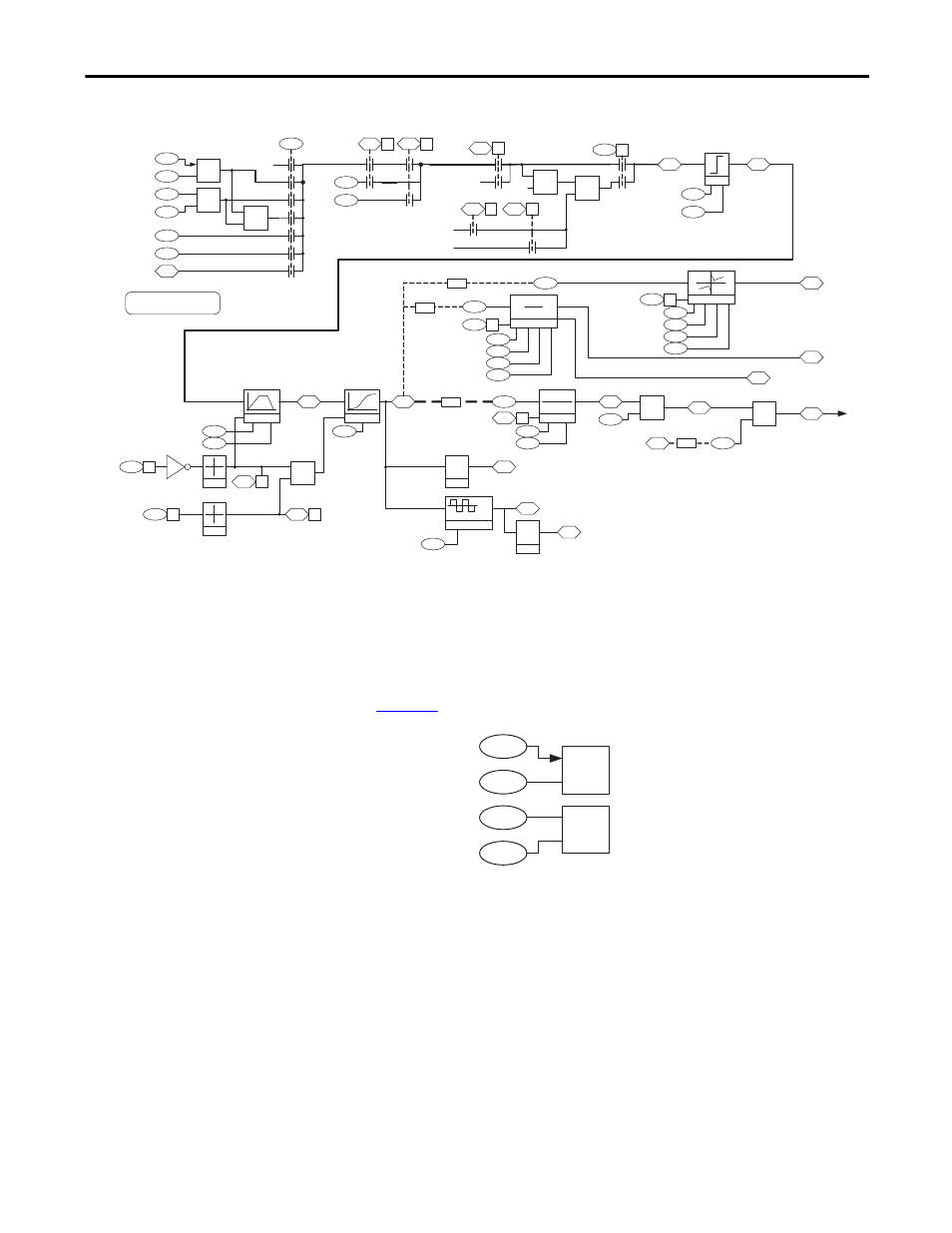
The first section of the reference selection block is speed reference scaling. Both
speed reference 1 and 2 have parameters associated with them to scale the values.
See
Figure 33
.
Parameter 10 [Speed Ref 1] and parameter 12 [Speed Ref 2] are real parameters
with units of per unit, where a value of 1 per unit equals base motor speed. Both
[Speed Ref 1] and [Speed Ref 2] have their own scaling blocks.
The speed reference value in [Speed Ref 1] is divided by the scaling parameter 11
[Speed Ref1 Divide]. [Speed Ref1 Divide] cannot be changed while running, and
cannot be linked to by another parameter.
The speed reference value for [Speed Ref 2] is multiplied by the scaling parameter
13 [Speed Ref2 Multi]. [Speed Ref2 Multi] is a linkable parameter. This allows
speed reference 2 to be scaled “dynamically” with an input signal if desired. An
example would be to have an analog input linked to the scale parameter. The
10
11
12
0
1
2
3
4
5
6
X
+
13
14
15
16
0
17
1
0
157
00
0
30
31
32
33
34
Inv
Logic
1 0
0 1
157
01
&
157
02
151
00
151
01
0
153
00
37
153
01
35
36
X
38
+
21
61
140
141
144
142
143
151
11
56
9
57
58
Max
X
1
40
1
152
0
47
46
44
180
43
62
63
42
20
Speed Ref 1
Limit
Ramp
S Curve
Spd Ref1 Divide
Speed Ref 2
Spd Ref2 Multi
Speed Ref 4
Speed Ref 5
Speed Ref DPI
Jog Speed 2
Speed Ref Sel
Applied LogicCmd
Logic Ctrl State
Control Options
Applied LogicCmd
Logic
1 0
0 1
41
Rev Speed Limit
Fwd Speed Limit
Selected Spd Ref
Limited Spd Ref
Inertia Comp
Δ
n
Δ
t
Friction Comp
Inertia SpeedRef
InertiaAccelGain
InertiaDecelGain
Total Inertia
Logic Command
(Inertia Comp)
Logic Command
(Frict Comp)
FricComp TorqAdd
FricComp Setup
FricComp Stick
FricComp Slip
FricComp Rated
145
59
45
Delayed Spd Ref
FricComp Spd Ref
Link
Link
Link
Spd Ref Bypass
Control Options
(SRef Filt En)
SpdRef Filt Gain
SpdRef Filt BW
Filtered Spd Ref
Scaled Spd Ref
Spd Trim1 SpdRef
Speed Trim 1
S Curve Spd Ref
Speed Ref Scale
from Process
Control [5G2]
Link
Virtual Encoder
4x internal
Virt Encoder PPR
Virt Encdr Posit
Virt Encdr Dlyed
Ramped Spd Ref
S Curve Time
Accel Time
Decel Time
Logic Command
(SpdRamp Dsbl)
Logic Command
(Spd S Crv En)
Logic Ctrl State
(SRef Ramp En)
Logic Ctrl State
(SRef SCrv En)
Inertia Torq Add
(Unipol Fwd) +1
(Unipol Rev) -1
to Speed Control
- Regulator [3A2]
to Torque
Control [4B2]
to Torque
Control [4B1]
Delay
One
Scan
Delay
One
Scan
/
PI Output
60
DeltaSpeedScale
152
151
10
18
0
18
152
23
Jog Speed 1
0
1
1
55
Speed Comp
Lead Lag
(kn * s)+ wn
s + wn
20
152
21
1
*
set the desired port in
param 691
*
10
11
12
X
13
Speed Ref 1
Spd Ref1 Divide
Speed Ref 2
Spd Ref2 Multi
/