Position offset – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 85
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
85
Detail Drive Configuration and Operation
Chapter 1
where:
where:
Solving for the lowest common denominator, the 1024s on the top and bottom
cancel out so that:
Therefore, parameter 745 [PositRef EGR Mul] = 4 and parameter 746 [PositRef
EGR Div] = 1. This will set up the position loop of the follower to move 4 counts
for every 1 count of the master.
[Spd Ref 2 Multi] is calculated:
Notice that the encoder PPRs should not be included in the calculation for
parameter 13 [Spd Ref2 Multi].
[Spd Ref2 Multi] is rounded to the 4th decimal place. The position loop gear
ratios will be exact, so that the follower tracks at 4 times the master's speed.
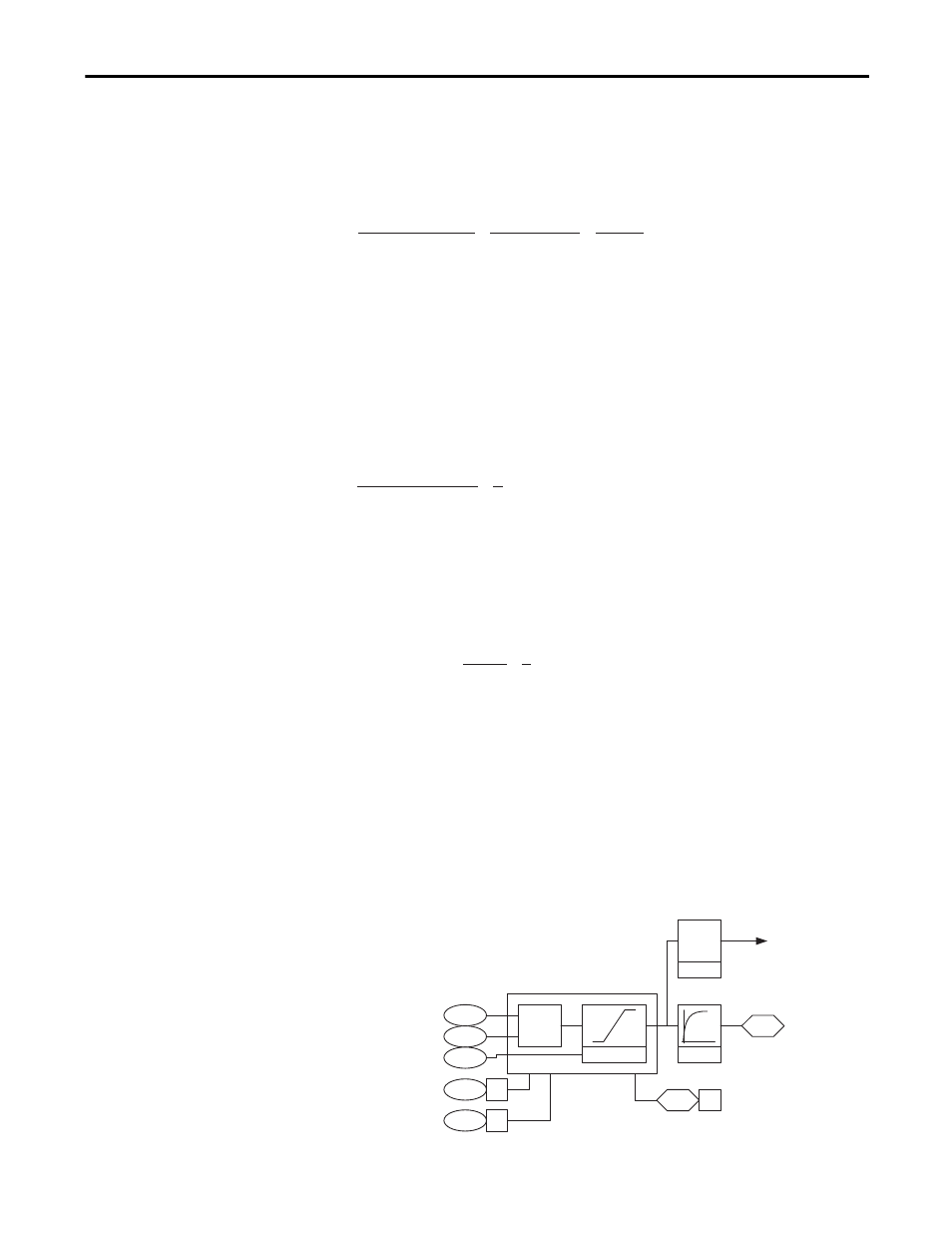
Position Offset
Offsets can be added to the position reference. Offsets are used to make a
correction move to synchronize the follower to the master position.
PPRm
= the PPR of the master encoder
PPRf
= the PPR of the follower encoder
Ratiof:Ratiom
= the desired ratio between the follower speed and the master speed
CPRf
= the counts per revolution of the follower feedback device. For an incremental
encoder this is 4 times the encoder PPR. For a Stegmann Hi-Res encoder this is
1048576. For a Resolver this is 65536.
CPRm
= the counts per revolution of the master encoder. For an incremental encoder this is
4 times the encoder PPR. For a Stegmann Hi-Res encoder this is 1048576. For a
Resolver this is 65536.
1
4096
4
4096
Div]
EGR
[PositRef
Mul]
EGR
[PositRef
=
=
Ratiom
CPRm
Ratiof
CPRf
1
4
Div]
EGR
[PositRef
Mul]
EGR
[PositRef
=
4
1
4
]
Multi
Ref2
Spd
[
=
=
=
Ratiom
Ratiof
+
Rate Lim
753
754
755
LPass
Filter
756
Posit Offset 1
Posit Offset 2
Posit Offset Spd
Position Control
(X Offset Pol)
Position Control
(X Offset Ref)
Deriv
Δ
740
04
740
05
741
05
Position Status
(X OffRefActl)
Added to position
reference after
EGR