Torque regulation mode – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 153
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
153
Detail Drive Configuration and Operation
Chapter 1
In a speed regulated application, the speed regulator output generates the torque
reference. Note that under steady state conditions the speed feedback is steady
while the torque reference is a constantly adjusting signal. This is required to
maintain the desired speed. In a transient state, the torque reference changes
dramatically to compensate for a speed change. A short duration change in speed
is the result of increasing or decreasing the load very rapidly.
Inertia Torque Add and Friction Compensation Torque Add are summed with
the output of the speed regulator. See Friction Compensation on page
Inertia Compensation on page
.
Torque Regulation Mode
A torque regulated application can be described as any process requiring some
tension control. An example is a winder or unwinder with material being “drawn”
or pulled with a specific tension required. The process requires another element
setting the speed. Configuring the drive for torque regulation requires
[Spd/Trq Mode Sel] to be set to 2. In addition, a reference signal must be linked
to the Torque Reference. If an analog signal is used for the reference, link
parameter 800 [Anlg In1 Data] to parameter 111 [Torque Ref 1].
When operating in a torque mode, the motor current will be adjusted to achieve
the desired torque. If the material being wound/unwound breaks, the load will
decrease dramatically and the motor can potentially go into a “runaway”
condition.
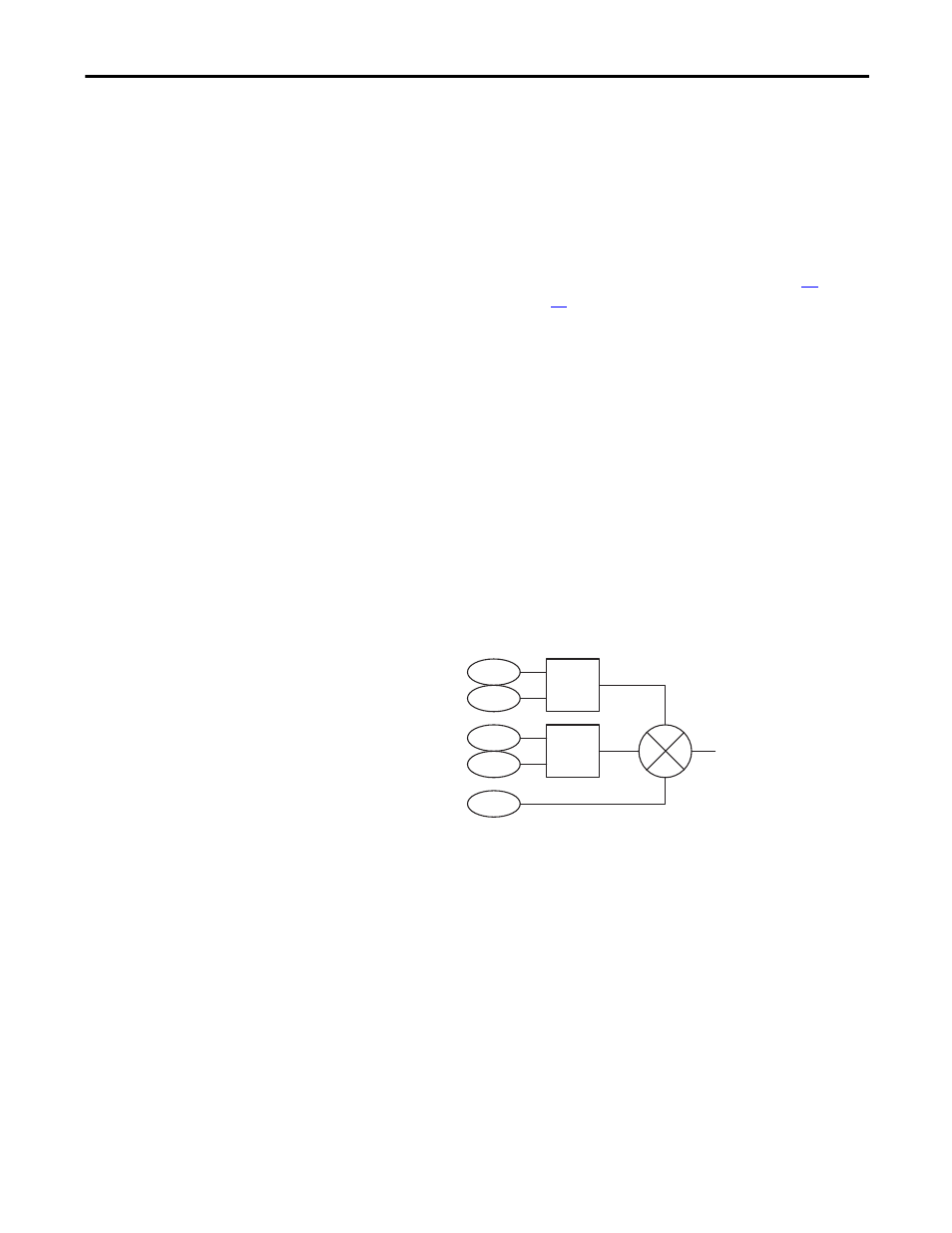
Torque Reference:
•
Parameter 111 [Torque Ref 1] is divided by parameter 112 [Torq Ref1
Div]
•
Parameter 113 [Torque Ref 2] is multiplied by parameter 114 [Torq Ref2
Mult]
•
Parameter 115 [Torque Trim] can be used to trim the torque. For example,
[Torque Trim] can be linked to an analog input or to the Process PI
output.
The final torque reference, in the Torque Mode, is the sum of scaled [Torque Ref
1], scaled [Torque Ref 2], and [Torque Trim].
111
X
112
113
114
115
/
+
+
+
Torque Ref 1
Torq Ref1 Div
Torque Ref 2
Torq Ref2 Multi
Torque Trim