Datalink programming – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 116
116
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
Chapter 1
Detail Drive Configuration and Operation
Datalink Programming
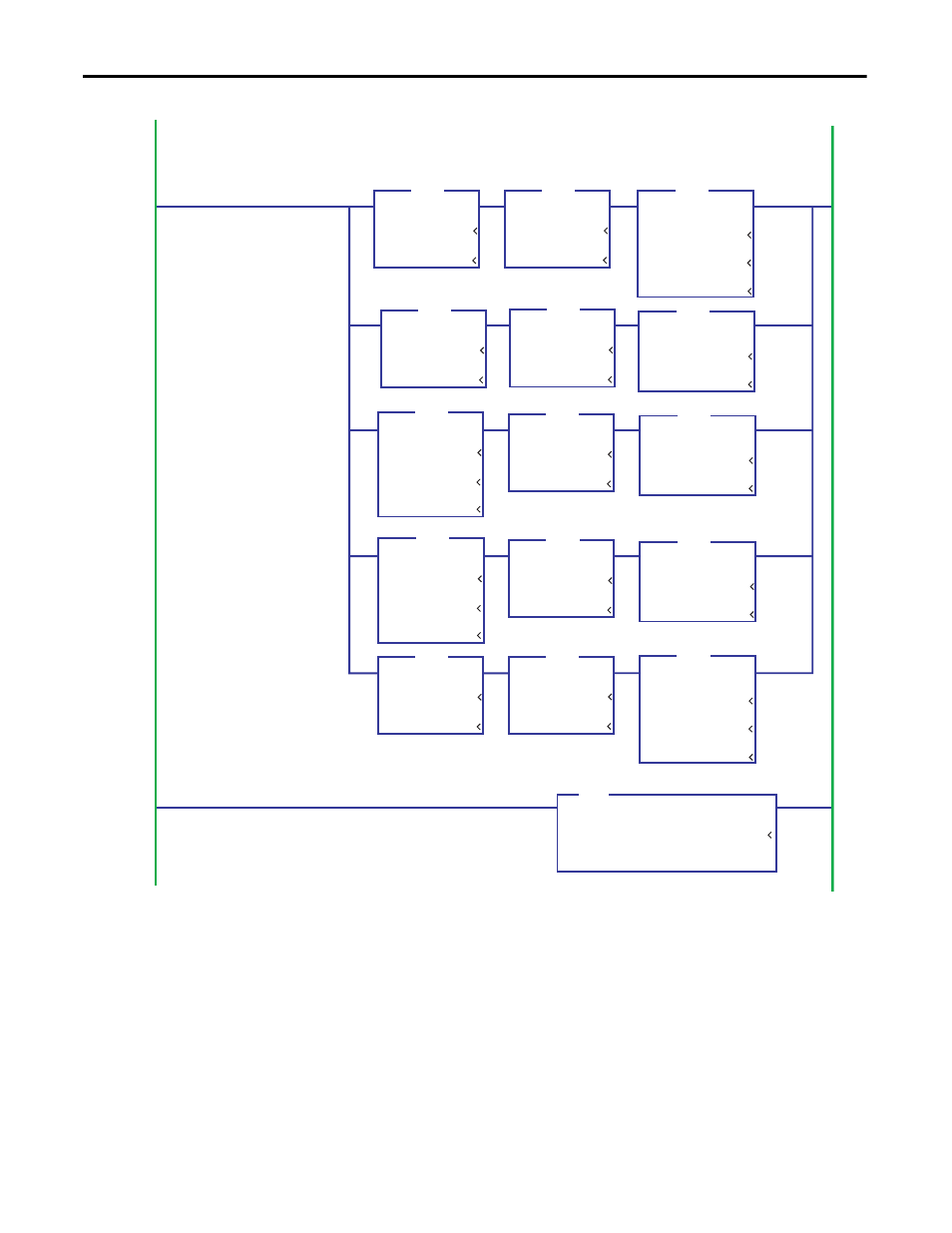
Datalinks are transmitted and received through block transfers. The SLC/PLC-5
is limited to 16 bit integers and floating point. Because the SLC/PLC-5 does not
support 32-bit integers, 32-bit integer Datalinks remain split into two, 16 bit
integers. In order to send or receive floating-point Datalinks we have to swap the
LSW and MSW and utilize the COP (copy) instruction. The following examples
are for transmitting and receiving the floating-point Datalinks, but do not show
the logic for the block transfer I/O messages. See Chapter 4 of the 20-COMM-R
User Manual for an example program for the block transfer I/O messages.
EQU
SUB
Equal
Source A
Source B
N11:111
0
-1
-1
Subtract
Source A
Source B
Dest
N11:110
0
65536.0
65536.0
F12:2
0.0
EQU
MOV
Equal
Source A
Source B
N11:111
0
-1
-1
Move
Source
Dest
-32768.0
-32768.0
F12:2
0.0
MOV
Move
Source
Dest
N11:110
0
F12:2
0.0
LIM
Limit Test
Low Lim
Test
High Lim
-32767.0
-32767.0
N11:110
0
-1.0
-1.0
Convert the speed feedback that comes over RIO as 2, 16 bit intergers into a 32 bit floating feedback.
N11:10 = LSW of speed feedback from RIO (counts)
N11:111 = MSW of speed feedback from RIO (counts)
F12:2 = 32 bit floating point speed feedback (counts)
0002
GRT
Greater Than (A>B)
Source A
Source B
N11:110
0
0
0
EQU
Equal
Source A
Source B
N11:110
0
-32768.0
-32768.0
EQU
Equal
Source A
Source B
N11:111
0
-1
-1
MOV
Move
Source
Dest
N11:110
0
F12:2
0.0
LIM
Limit Test
Low Lim
Test
High Lim
0.0
0.0
N11:110
0
32767.0
32767.0
EQU
Equal
Source A
Source B
N11:111
0
0
0
ADD
Add
Source A
Source B
Dest
N11:110
0
65536.0
65536.0
F12:2
0.0
EQU
Equal
Source A
Source B
N11:111
0
0
0
LES
Greater Than (A
Source B
N11:110
0
0
0
Compute
Dest
F12:3
0.0
Expression
(F12:2 I 32768.0) * F12:4
CPT
Convert the speed feedback into an RPM value.
F12:3 = speed feedback (RPM)
F12:2 = 32 bit floating point speed feedback (counts)
F12:4 = base motor speed (RPM)
0003