Enabling the position loop, Position reference selection – Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 84
84
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
Chapter 1
Detail Drive Configuration and Operation
Enabling the Position Loop
To enable the position loop, set parameter 151 [Logic Command] bit 13
“PositionEnbl” = 1.
Then to allow the output of the position loop to trim the speed set parameter 740
[Position Control] bit 1 “Speed Out En” = 1.
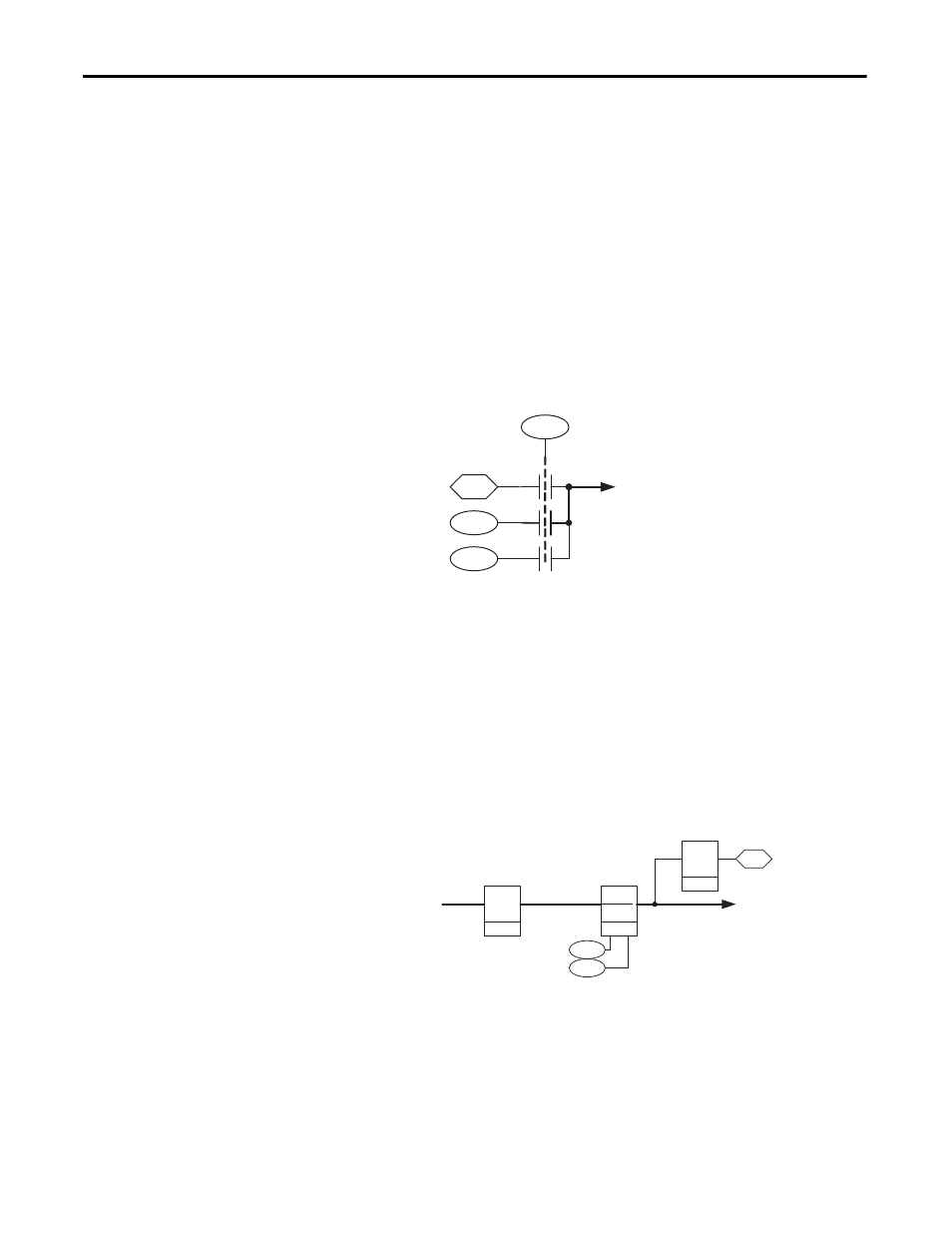
Position Reference Selection
For a position follower application set parameter 742 [Posit Ref Sel] = 1 “Aux
PositRef ”. This uses counts from a linked source for the position reference to the
position loop.
Link parameter 742 [Aux Posit Ref ] to the position for the feedback device. For
example, link parameter 742 [Aux Posit Ref ] to parameter 240 [Encdr1
Position]. Encoder 1 position becomes the position reference for the position
loop.
Set the EGR (Electronic Gear Ratio) and Speed Reference Scaling
Position reference can be entered in user units by using the EGR scaling.
Parameters 745 [PositRef EGR Mul] and 746 [PositRef EGR Div] are used to
scale the position reference.
Example:
In this example the encoders are mounted on the motors. The motors
are directly coupled to the load and we want the follower to run at 4 times the
speed of the master.
PPRm
= 1024 PPR
PPRf
= 1024 PPR
Ratiof:Ratiom
= 4:1
0
1
2
749
743
742
Interp Position
Posit Ref Sel
758
Aux PositRef
Pt-Pt Posit Ref
Selected
Position
Reference
Gear Rat
[ N ]
[ D ]
745
746
PositRef EGR Mul
PositRef EGR Div
Accum
744
PositRef EGR Out
Deriv
Δ
∑
Selected position
reference
Geared position
reference