Rockwell Automation 20D PowerFlex 700S with Phase I Control Reference Manual User Manual
Page 65
Rockwell Automation Publication PFLEX-RM002D-EN-E - August 2013
65
Detail Drive Configuration and Operation
Chapter 1
Parameter 141 [FricComp Setup] is used to configure the friction compensation
algorithm. This is a packed word of 3 digits. Each digit has a possible selection of
10 levels.
•
The least significant digit sets the speed threshold in intervals of 0.0005 pu
speed.
•
The next (middle) digit sets the hysteresis band for the “units” digit in
intervals of 0.0005 pu velocity.
•
The most significant digit sets the number of time steps from stick to slip,
each step is 0.002 second.
Example: Fsetup = 524 means: 5 time steps between stick and slip, each of
0.002 second. duration, 2 counts of hysteresis or 0.001 pu_speed (each count is
0.0005 pu speed), and 4 counts or 0.002 pu_speed is the trigger threshold (each
count is 0.0005 pu speed).
Parameter 142 [FricComp Stick] sets the torque reference needed to break away
from zero speed. Breakaway torque due to friction is always greater than running
torque due to friction. This parameter is in per unit, so a value of 1 equals 100%
motor torque.
Parameter 143 [FricComp Slip] sets the torque level to sustain very low speed
once breakaway has been achieved. Again, the torque required to run very close
to 0 speed due to friction will be greater than the torque required to run at higher
speeds due to friction. This parameter is in per unit, so a value of 1 equals 100%
motor torque.
Parameter 144 [FricComp Rated] sets the torque needed to keep the motor
running at base motor speed and with no process loading. This parameter is in
per unit, so a value of 1 equals 100% motor torque. The friction compensation
algorithm assumes a linear or viscous component of friction between [FricComp
Slip] and [FricComp Rated].
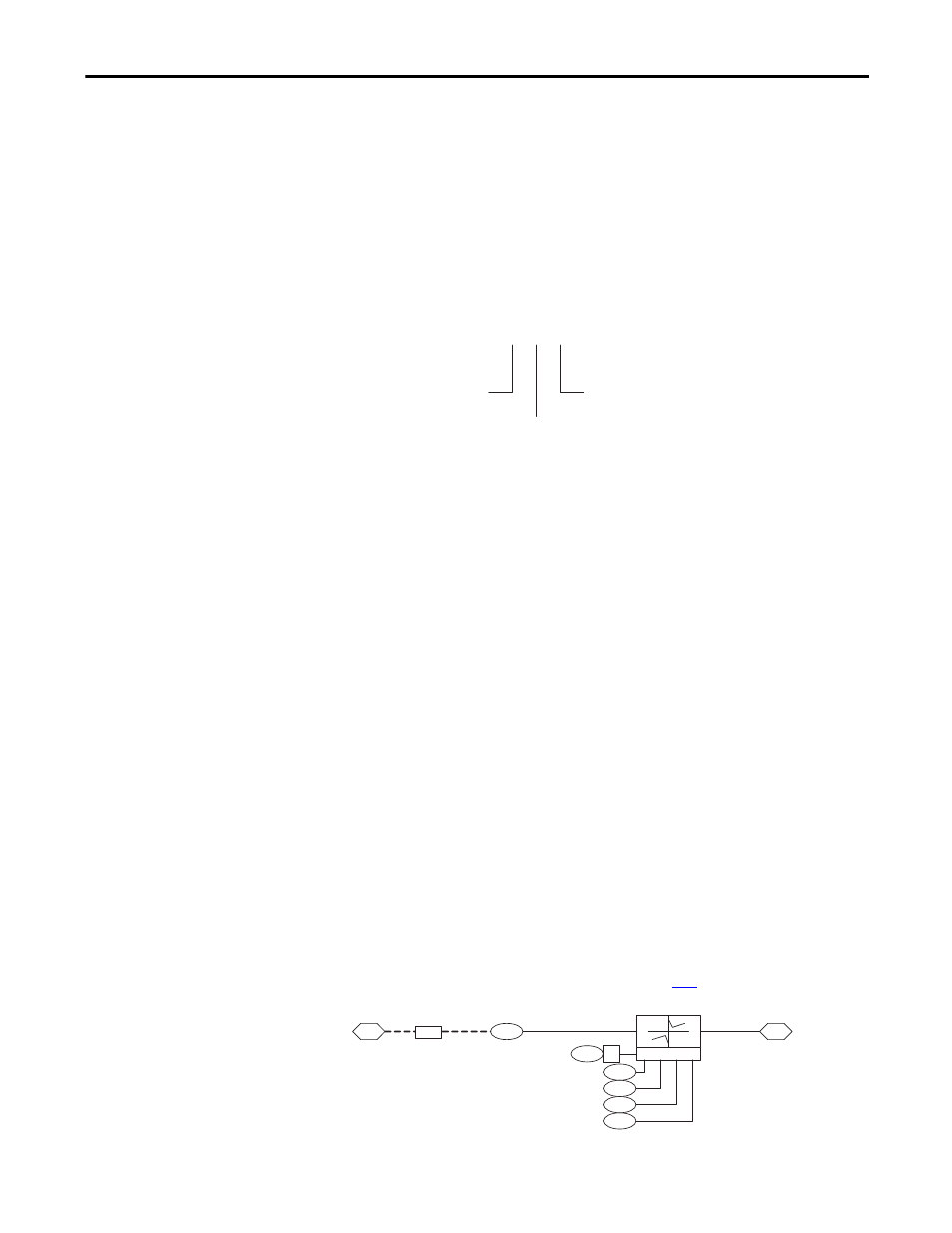
The friction compensation block calculates the torque needed due to friction,
which shows up in parameter 145 [FricComp TorqAdd]. [FricComp TorqAdd]
is summed with the output of the inertia compensation block and the torque
generated by the speed reference loop. That summed torque enters the torque
selection block refer to Torque Reference on page
for more information).
Units
Hysteresis
Number of
Time Stops
N N N
140
141
144
142
143
151
11
43
Friction Comp
FricComp Setup
FricComp Stick
FricComp Slip
FricComp Rated
145
FricComp Spd Ref
Link
to Torque
Control [4B2]
FricComp TorqAdd
S Curve Spd Ref